
MBDエンジニア養成コース
■MBDエンジニア養成コース
MBDエンジニア養成コースは、3つの講座を通して、はじめてSimulinkに触るエンジニアがETSS-JMAAB のLevel2(入門レベル)の制御システム 設計エンジニアにスキルアップすることを目指すトレーニングコースです。
(1) 基礎編 - モデルベース開発のための初めてのMATLAB/Simulink入門(2日間)
(2) 演習編 - 車両モデル作成演習(2日間)
(3) 演習編 - 制御モデル作成演習(2日間)
本コースのテキストの「自動車業界MBD エンジニアのためのSimulink 入門」(久保 孝行著) は、実際に自動車業界のMBD 導入企業で行われている新人研修の内容をベースに書下ろされた研修書です。このため、本コースは自動車業界または関連企業の開発部門の新人社員研修等の集合研修として利用いただけるコースとなっています。
6 日分の講習と受講者の自習課題取組みで、ETSS-JMAAB のLevel2相当の制御システム設計エンジニアのスキル習得に必要な大量の演習問題をこなしていただきます。 小さくシンプルなモデル作成で積み重ね、その成果物を統合して、最終的に300 ブロック程度の車両モデルとクルーズコントロールの2つのモデルを完成していただきます。大量の演習をこなすことでより実践的なモデル作成のプロセスを体得していくことを目指してるコースとなります。
■MBDエンジニア養成コース詳細
基礎編 - モデルベース開発のためのMATLAB/Simulink 入門
.jpg)
はじめてMATLAB/Simulink を使うエンジニアを対象に、これから学ぶモデルベース開発の基本となるMATLAB/Simulink の基本操作を基礎から演習を通して体験しながら学んでいく、2.0 日間のコンパクトなコースです。
日数:2.0日(12h)
定員:6名
<Agenda>
1) モデルベース開発のためのMATLAB 基本操作
2)Simulink の基本操作
-Simulinkの基本ブロックと基本操作
-よく使うブロック
-よく使う基本テクニック
3) モデル作成とシミュレーション(演習)
-水道から水を流してバケツを満水にする。
-自由落下のシミュレーション
-回転系のシミュレーション
-追加例題他
< 利用ソフトウェア>
本講習では、R2012b のMATLAB、Simulink を利用します。
■コース参加の前提条件
- 高校レベルの物理の計算が出来る方
- Word やExcel など標準的なアプリケーションが使える方
■習得できる知識・スキル
- このコースで習得できるのは、モデルベース開発の現場でMATLAB/Simulink を利用するためのツールの基本操作となります。
- MATLAB の基本操作につきましては、Simulink を中心に使うための最低限の操作のみを対象としています。MATLAB 環境を本格的に利用するためには、別途、他のトレーニングに参加されることをお勧めします。
※1.本コース内容は、MathWorks 社のトレーニングで代用して他の演習コースを受講することもできます。特にMATLAB 環境を主に利用される方は、MathWorks 社のトレーニングコースの受講をお勧めします。
※2.本コース内での演習は、初級レベルの内容のため、自動車業界以外の方でも利用される一般的な例題が使われています。 主にSimulink 利用を前提とした受講者であれば、自動車業界以外の方にもご活用いただけます。
演習編(1)-車両モデル作成演習
 本講座は、Simulink の基本操作を既に学習された方がより実践的なモデル作成の経験を蓄積することで、モデル作成の基本テクニックをブラッシュアップするためのコースです。
本講座は、Simulink の基本操作を既に学習された方がより実践的なモデル作成の経験を蓄積することで、モデル作成の基本テクニックをブラッシュアップするためのコースです。
基礎編と同様に「自動車業界MBD エンジニアのためのSimulink 入門-4 週間で学ぶSimulink 実践トレーニング-」 久保 孝行著 の書籍(ISBN978-4-906864-01-0) を講習テキストとして利用ます。走行抵抗、トルクコンバーター、エンジン、変速機など機能単位のシンプルな実践的なモデルの作成で積み重ねていただき、実践的なモデル作成スキルをブラッシュアップしていただきます。
講習期間:2日間
定員:6名
<Agenda>
1) 単位変換等の基本テクニック
2) 走行抵抗モデル作成
3) トルクコンバーターモデル作成
4) エンジンモデル作成
5) 変速機モデル作成
6) 車両全体の統合モデル作成
7) 速度制御シミュレーション
※本講習時間内で、テキストのすべての演習を終えることはできません。講習後に受講者自ら演習問題に取り組むことで、使いこなせるレベルのモデリングスキルの習得を目指していく実践的な内容となっています。
< 利用ソフトウェア>
本講習では、R2012b のMATLAB、Simulink を利用します。
■コース参加の前提条件
- 高校レベルの物理の計算が出来る方(※第3章:基礎力チェックの内容が理解できる方)
- Simulink の基本操作ができる方(「モデルベース開発のためのはじめてのMATLAB/Simlink 入門」の受講修了者相当)
■習得できる知識・スキル
- 本講座では、ETSS-JMAAB で定義される制御システム設計エンジニアLevel2相当のスキルのベースとなる機能単位の小規模なモデル作成のスキルが習得できます。
- 本講習では、よりモデルベース開発の現場で使えるスキル習得に集中するため、制御理論の説明をコース内容から切り離しています。制御理論の教育内容は含まれていませんので、あらかじめご了承ください。
演習編(2)-制御モデル作成演習
本講座は、Simulinkの基本操作、車両モデルの作成演習を習得した受講者がETSS-JMAAB のLevel2( 入門レベル)の制御システム 設計エンジニアにスキルアップするための仕上げの演習コースです。
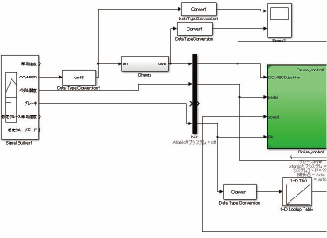
基礎編、演習編(1)と同様に「自動車業界MBD エンジニアのためのSimulink 入門-4 週間で学ぶSimulink 実践トレーニング-」 久保 孝行著 の書籍(ISBN978-4-906864-01-0) を講習テキストとして利用します。ここまで積み重ねてきた小さなシンプルなモデル作成の成果物を統合して、最終的に300 ブロック程度の車両モデルとクルーズコントロールの2つのモデルを完成していただきます。大量の演習をこなすことでより実践的なモデル作成のプロセスを体得していくことを目指していきます。
講習期間:2日間
定員:6名
<Agenda>
1) 制御モデル作成のための基本テクニック
-制御設計で使われる機能(タイマー)
-範囲内を示す
-分岐条件の例題
-Unit Delayの活用
-配列の活用(forループ)
-列挙型データ、データオブジェクトの紹介
2) クルーズコントロールモデル作成
-コントローラ単体モデル
-車両モデルとの統合シミュレーション
※本講習時間内で、テキストのすべての演習を終えることはできません。講習後に受講者自ら演習問題に取り組むことで、使いこなせるレベルのモデリングスキルの習得を目指していく実践的な内容となっています。
< 利用ソフトウェア>
本講習では、R2012b のMATLAB、Simulink を利用します。
■コース参加の前提条件
- 高校レベルの物理の計算が出来る方(※第3章:基礎力チェックの内容が理解できる方)
- Simulink の基本操作ができる方(「モデルベース開発のためのはじめてのMATLAB/Simlink 入門」の受講修了者)
■習得できる知識・スキル
- 演習編(1)及び演習編(2)の演習問題をこなされた受講者は、ETSS-JMAAB で定義される制御システム設計エンジニアLevel2相当のスキルのスキルが取得できます。(※講座内でテキストのすべての演習問題を終了することはできません。一部自習に取り組むことをお勧めしております。)
- 本講習では、よりモデルベース開発の現場で使えるスキル習得に集中するため、制御理論の説明をコース内容から切り離しています。制御理論の教育内容は含まれていませんので、あらかじめご了承ください。
MBD実践コース詳細
モデルベース開発のための状態遷移設計
.jpg)
モデルベース開発(MBD)で、Stateflow を使った状態遷移図・状態遷移表の記述方法を学びたい方のためのコースです。
状態遷移図、状態遷移表の意味論を理解しながら、Stateflow のツールを使って、記述するテクニックを学ぶことができます。Stateflow を全く使ったことのない方でも、基本操作から演習を通して体験しながら基本操作を学んでいただけます。
日数:2.0日間
定員:5名
<Agenda>
1)Stateflow の意味論と操作
2)状態遷移図応用編
3)可読性を考慮した記述スタイル
4)状態遷移の演習
< 利用ソフトウェア>
本講習では、R2012b のMATLAB、Simulink、Stateflow を利用します。
■コース参加の前提条件
– Simulink の基本操作ができる方。
■習得できる知識・スキル
このコースで習得できるのは、Stateflow の基本操作、意味論と組込みソフトウェアの開発現場で継続して状態遷移図を利用するための可読性や再利用性を確保するためのテクニックです。本講座は、特に自動車業界だけに特化した内容ではありません。組込みソフトウェア開発の方であれば、様々な業界の方に広くご参加いただけます。