
目次
初めに
本記事では、unitree_ros2を用いて、Go2をキーボードから操作する2次開発方法についてご案内します。
※最終更新日:25/07/24
環境
環境は、次のようなものを想定しています。
- 機種: Go2 R&D(Edu), R&D+(Edu+)(AIR/PROではないもの)
- Docking Station or 外部PC:ubuntu20/22, ROS2 foxy/humble
1.環境設定
を参考に、unitree_ros2の環境構築が完了しているものとします。
2.開発に必要な参考情報
-
サンプルコード:
sport_mode_ctrl.cpp – unitree_ros2 / github.com
-
sport_client一覧:
ros2_sport_client.h – unitree_ros2 / github.com
-
公式開発ドキュメント:
Sports Services Interface – Go2 SDK Development Guide
が参考になります。
ただしサンプルコードは、TrajectoryFollowの用法になり、今回使用したいMove関数は使っておりません。
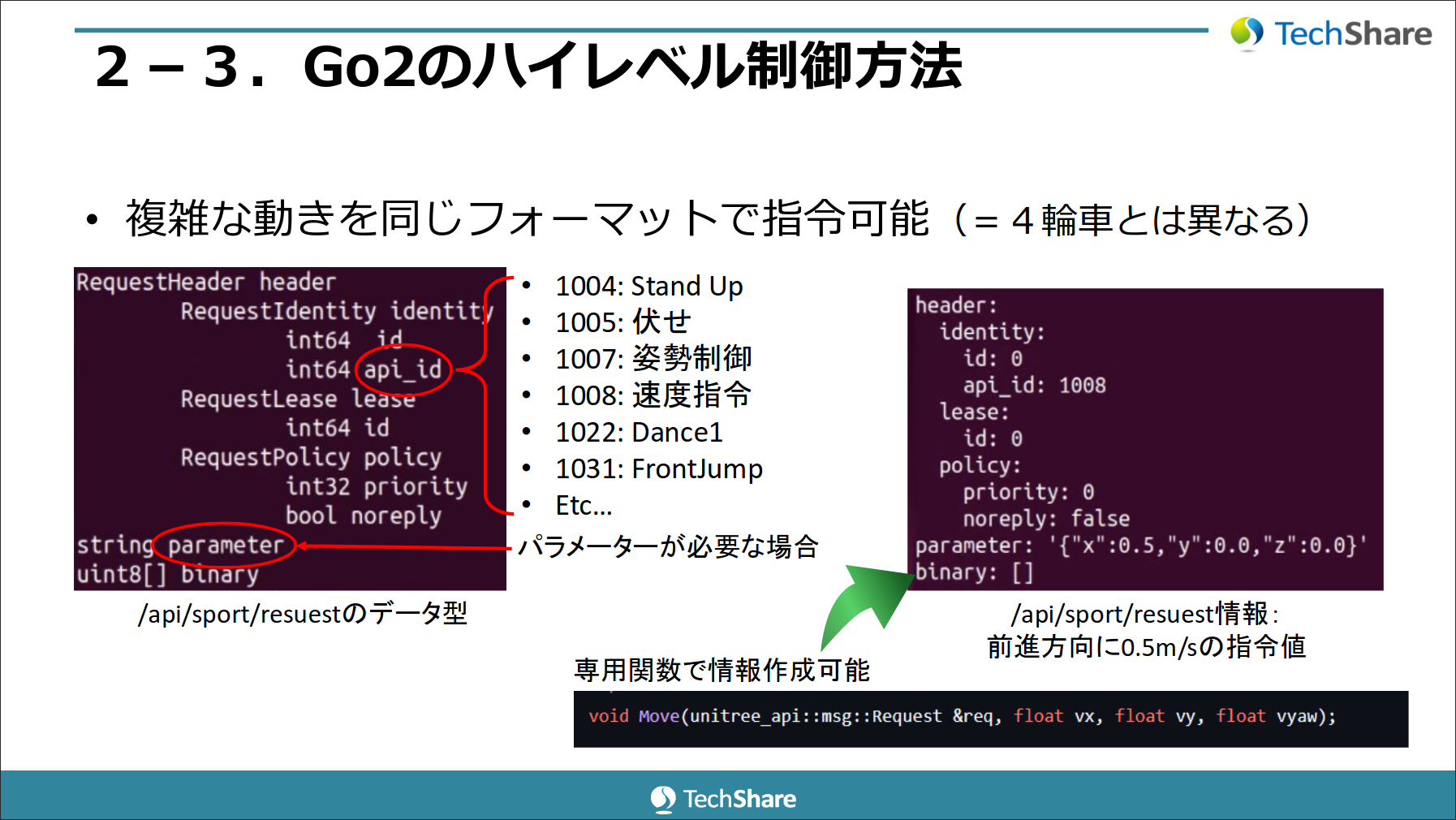
ROS2による制御法
本記事のサンプルの構造
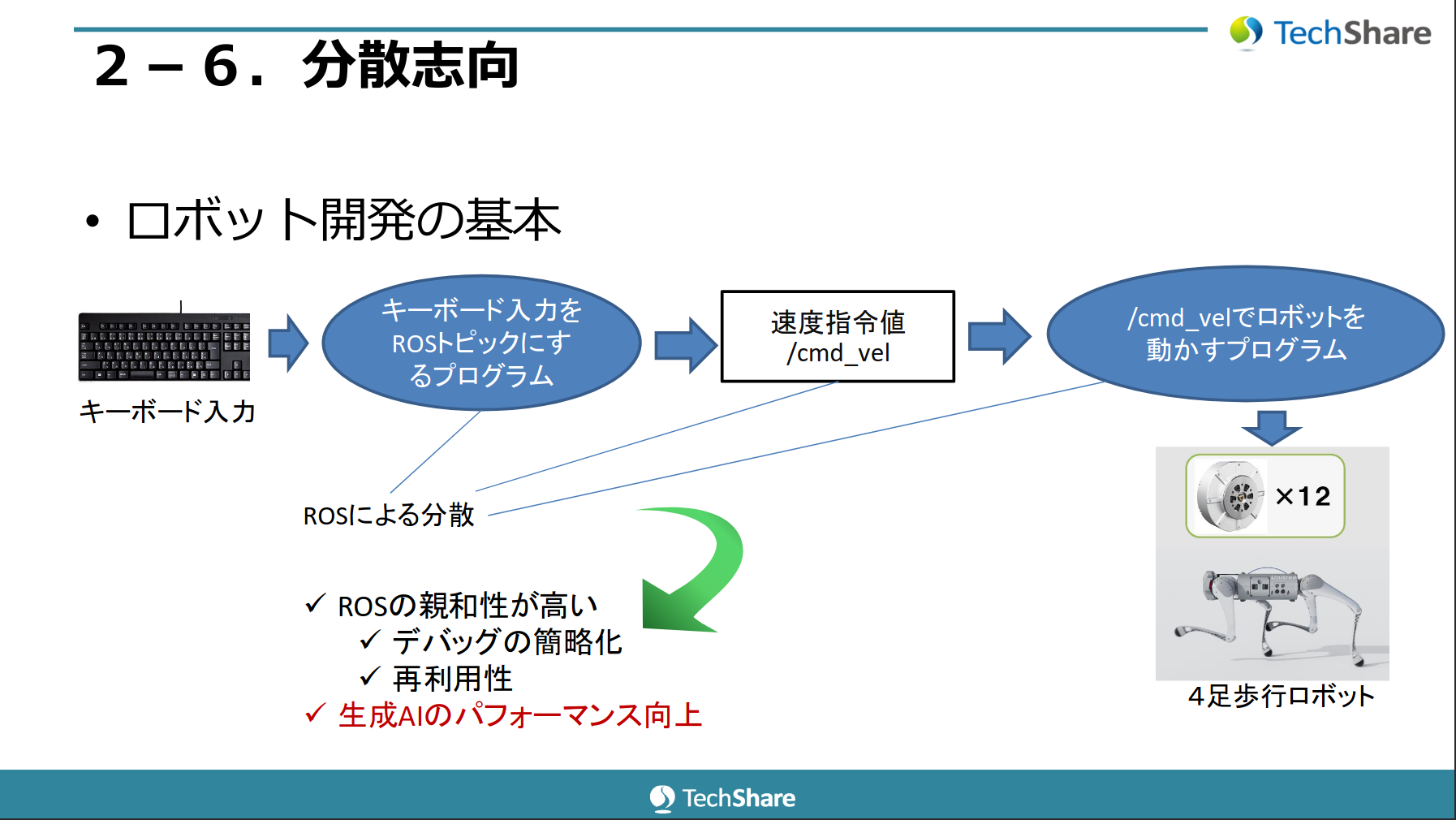
※ 参考資料: Robot Innovation Week 2024 発表スライド
3.実装例:cmd_vel_control
$ git clone -b cmd_vel_control https://github.com/TechShare-inc/go2_unitree_ros2.git ts_example_wscmd_vel_control.cppが新たに作成したプログラムになります。
このコードは、ROS2ノードを使用して/cmd_velトピックを購読し、Go2ロボットの動作を制御します。特に、cmdVelCallback関数で、キーボード操作から得た速度指令(/cmd_vel)をGo2ロボットの制御コマンドに変換しています
変換の際には、sport_client_.Moveという関数が用意されており、これを用いるだけでUnitreeROS2の形式でロボットに指令を与えるトピックの形式に変換できます。
#include <iostream>
#include "rclcpp/rclcpp.hpp"
#include "unitree_api/msg/request.hpp"
#include "geometry_msgs/msg/twist.hpp"
#include "common/ros2_sport_client.h"
using namespace std::placeholders;
class CmdVelToSportRequest : public rclcpp::Node
{
public:
CmdVelToSportRequest() : Node("cmd_vel_to_sport_request")
{
// コマンド速度トピックを購読
cmd_vel_subscriber_ = this->create_subscription<geometry_msgs::msg::Twist>(
"/cmd_vel", 10, std::bind(&CmdVelToSportRequest::cmdVelCallback, this, _1));
// リクエスト送信用パブリッシャ
request_publisher_ = this->create_publisher<unitree_api::msg::Request>("/api/sport/request", 10);
}
private:
void cmdVelCallback(const geometry_msgs::msg::Twist::SharedPtr cmd_vel_msg)
{
// 受け取った/cmd_velメッセージを出力
RCLCPP_INFO(this->get_logger(), "Received cmd_vel: LinearX=%f, LinearY=%f, AngularZ=%f",
cmd_vel_msg->linear.x, cmd_vel_msg->linear.y, cmd_vel_msg->angular.z);
// /cmd_velメッセージをスポーツリクエストに変換
unitree_api::msg::Request req;
sport_client_.Move(req, cmd_vel_msg->linear.x, cmd_vel_msg->linear.y, cmd_vel_msg->angular.z);
// リクエストを送信
request_publisher_->publish(req);
// RCLCPP_INFO(this->get_logger(), "Published Request: LinearX=%f, LinearY=%f, AngularZ=%f",
// cmd_vel_msg->linear.x, cmd_vel_msg->linear.y, cmd_vel_msg->angular.z);
}
// 購読者
rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr cmd_vel_subscriber_;
// パブリッシャ
rclcpp::Publisher<unitree_api::msg::Request>::SharedPtr request_publisher_;
// SportClientインスタンス
SportClient sport_client_;
};
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<CmdVelToSportRequest>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
4.実行
4-1. build
$ git clone -b cmd_vel_control https://github.com/TechShare-inc/go2_unitree_ros2.git ts_example_ws
$ cd ts_example_ws
$ colcon build4-2. 実行
terminal 1:
$ source unitree_ros2/setup.sh
$ cd ts_example_ws
$ source install/setup.bash
$ ros2 run unitree_ros2_example cmd_vel_controlterminal 2:
$ source unitree_ros2/setup.sh
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard実行後、terminal 1では、/cmd_velを受け取り、/api/sport/requestを配信するプログラムが動いています。
terminal 2でキーボード操作を行うと、/cmd_velが配信され、terminal 1も動くという形になります。
実行の様子:動画リンク
※動画は、Payloadに外部PC(Ubuntu22/humble)を搭載して行っているが、JetsonOrinからでも問題なく実行できる。
このように行うと、Go2をキーボードから操作することができます。
4-3. さらに見てみよう:トピックのリアルタイムモニタリング
ROS 2では、ros2 topic echo <トピック名>で指定したトピックに流れるメッセージをリアルタイムに確認できます。
terminal 3:
$ source unitree_ros2/setup.sh
$ ros2 topic echo /cmd_velterminal 4:
$ source unitree_ros2/setup.sh
$ ros2 topic echo /api/sport/request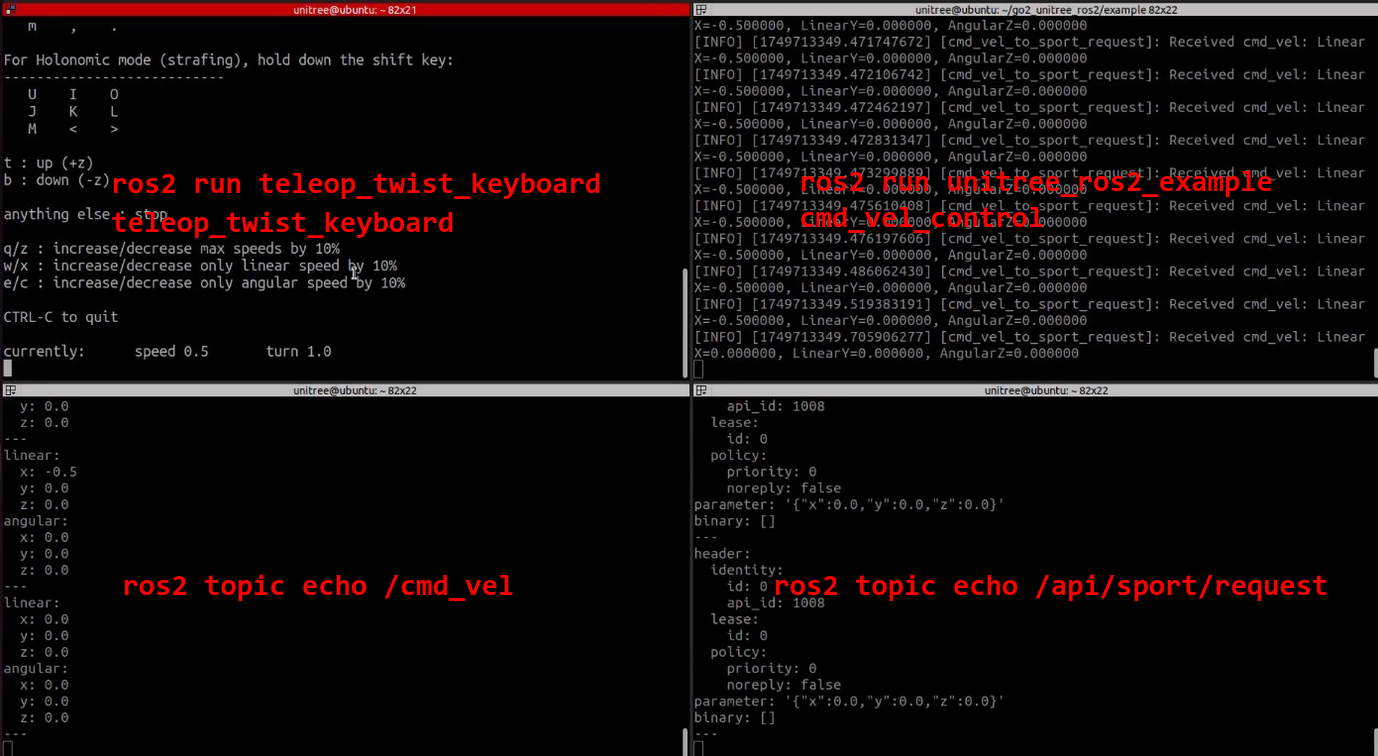
5.さらに修正してみよう!
このコードだと、立ち上がったり伏せたりすることができません。
teleop_twist_keyboardでは、tキーやbキーを用いると、linear.zの値を変えることができます。
これを使って、tキーやbキーを押したら、立ったり座ったりするようにしたいと思います。
上記コードでは、cmdVelCallbackで、/cmd_velトピックを受け取ったときの挙動を決定しています。
ここに、/cmd_velトピックの内容に応じて分岐するIF文を追加し、立ち上がりや伏せを行うようにします。
void cmdVelCallback(const geometry_msgs::msg::Twist::SharedPtr cmd_vel_msg)
{
// 受け取った/cmd_velメッセージを出力
RCLCPP_INFO(this->get_logger(),
"Received cmd_vel: LinearX=%f, LinearY=%f, LinearZ=%f, AngularZ=%f",
cmd_vel_msg->linear.x,
cmd_vel_msg->linear.y,
cmd_vel_msg->linear.z,
cmd_vel_msg->angular.z);
// linear.z が絶対値 0.1 以上のときに、StandUpもしくはStandDOwn
if (std::abs(cmd_vel_msg->linear.z) >= 0.1) {
if (cmd_vel_msg->linear.z > 0.0) {
unitree_api::msg::Request req;
sport_client_.StandUp(req);
request_publisher_->publish(req);
// 3秒待つ
std::this_thread::sleep_for(std::chrono::seconds(3));
sport_client_.BalanceStand(req);
request_publisher_->publish(req);
} else {
unitree_api::msg::Request req;
sport_client_.StandDown(req);
request_publisher_->publish(req);
}
}
else{
// /cmd_velメッセージをUnitreeロボットの指令値の形式に変換
unitree_api::msg::Request req;
sport_client_.Move(req, cmd_vel_msg->linear.x, cmd_vel_msg->linear.y, cmd_vel_msg->angular.z);
// リクエストを送信
request_publisher_->publish(req);
}
}これでcolcon buildし直せば、tキーやbキーを押したら、立ったり伏せたりするようになります。
おわりに
本記事では、unitree_ros2を用いて、Go2をキーボードから操作する2次開発方法について、解説しました。
本記事を参考に、Move関数の使い方や他の制御方法を使用する際のヒントになれば幸いです。
この記事が少しでも役に立てたのなら幸いです。