
目次
はじめに
本記事では、昨年末に公開されたUnitree Go2など四足ロボットの歩容を開発するためのシミュレーション環境であるGenesisのインストール手順について紹介いたします。(2025年1月31日現在)
ほかのシミュレーション環境で使用するパッケージと混同しないように、仮想環境を構築します。
環境
環境は、次のものを使用しています。
| ハードウェア項目 | 環境 |
|---|---|
| プロセッサ(CPU) | Intel® Core™ i7 11700F |
| グラフィックスカード(GPU) | NVIDIA® GeForce RTX™ 3060 |
| ロボット本体 | 今回は使用しません。 |
| ソフトウェア項目 | 環境 |
|---|---|
| OS | Ubuntu22.04 |
| Python | 3.10 |
0. 参考ドキュメント
Genesis
RSL RL
1. Genesisをクローンする
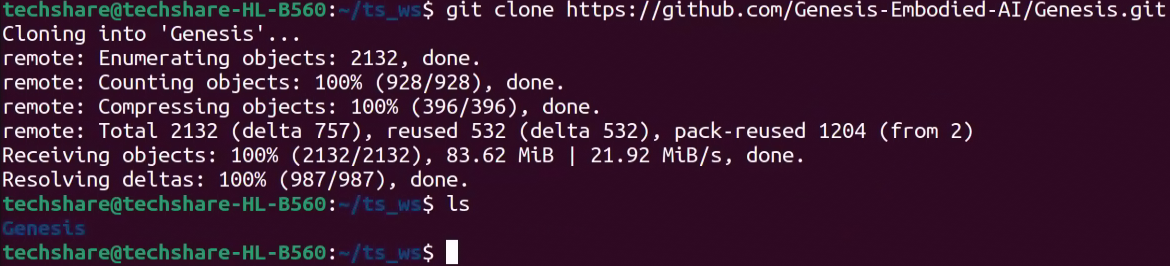
まず、Genesis-GitHubをクローンします。
git clone https://github.com/Genesis-Embodied-AI/Genesis.git
2. 仮想環境を作る
Genesis直下に仮想環境を作成し、起動します。(今回の仮想環境名はvenvです。)
cd Genesis
python3 -m venv ./<仮想環境名>
source <仮想環境名>/bin/activate

仮想環境が起動すると、(<仮想環境名>)が出現します。
deactivateを実行すると仮想環境を終了できますが、以降、Genesisを使いたい場合、必ず仮想環境を起動してください。
3. genesis-worldをインストールする
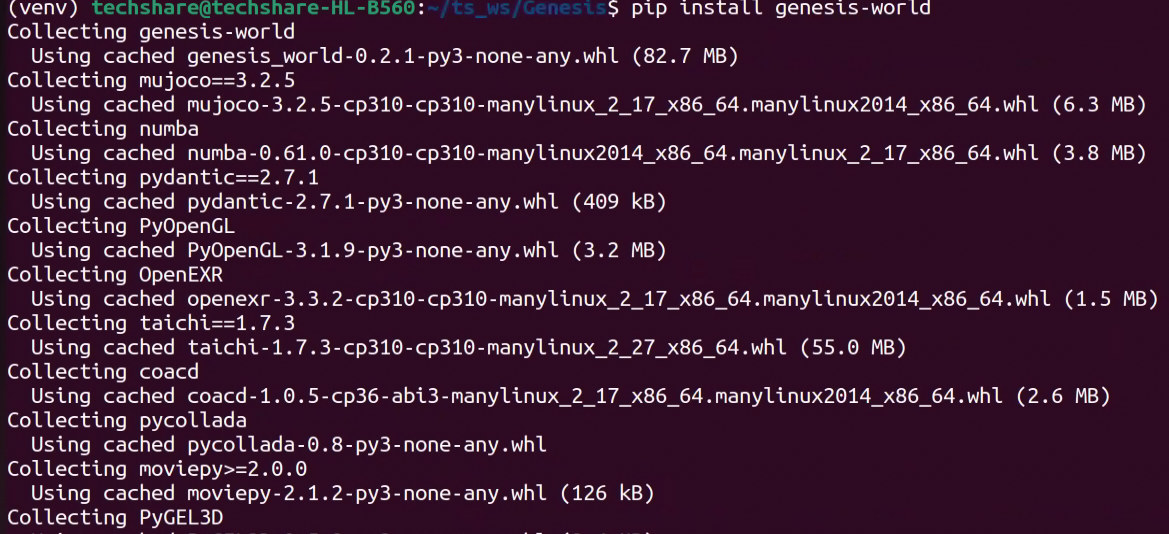
仮想環境を起動すると、genesis-worldをインストールします。
pip install genesis-world
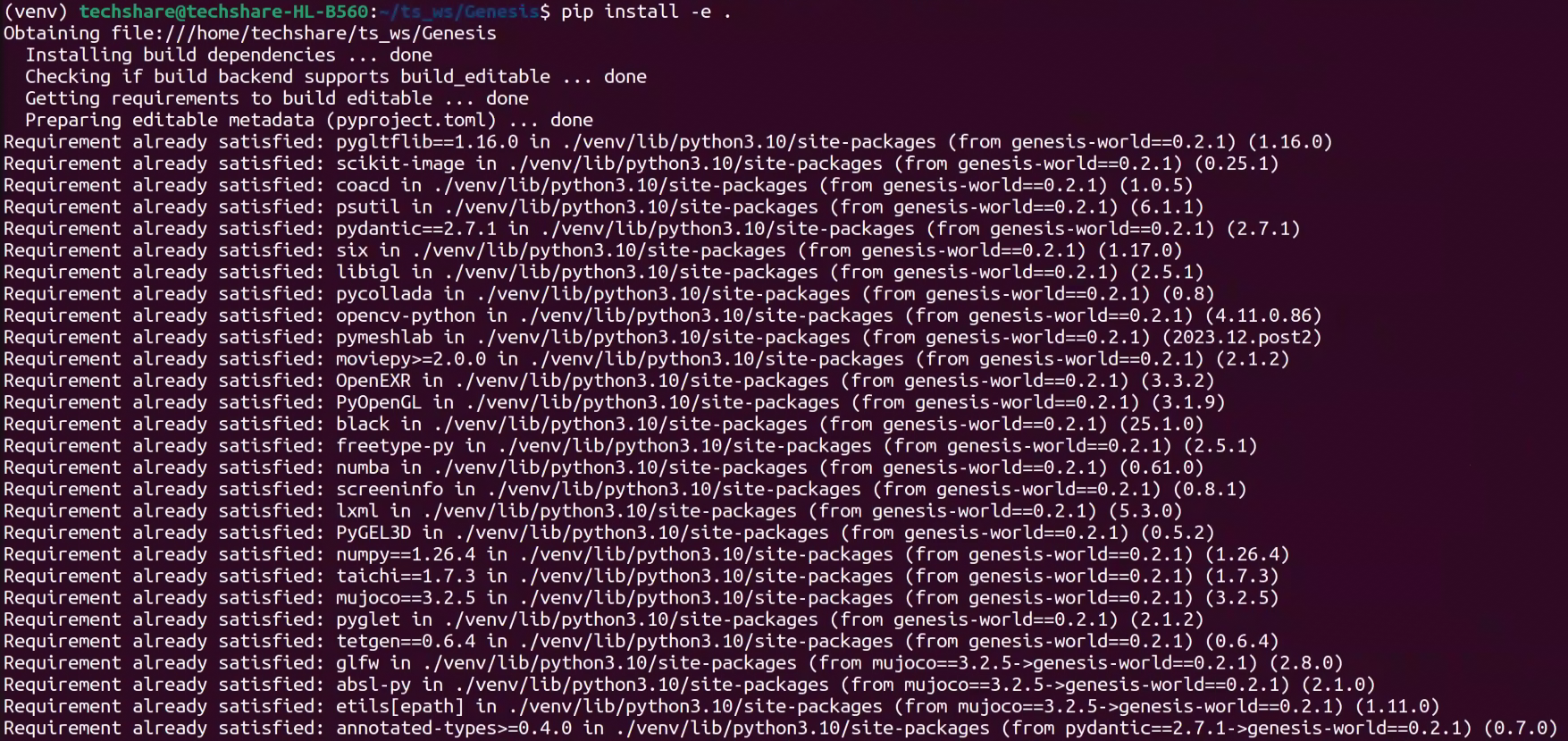
4. Gensisでpip install -e .を行う
pip install -e .
5. RSL RL
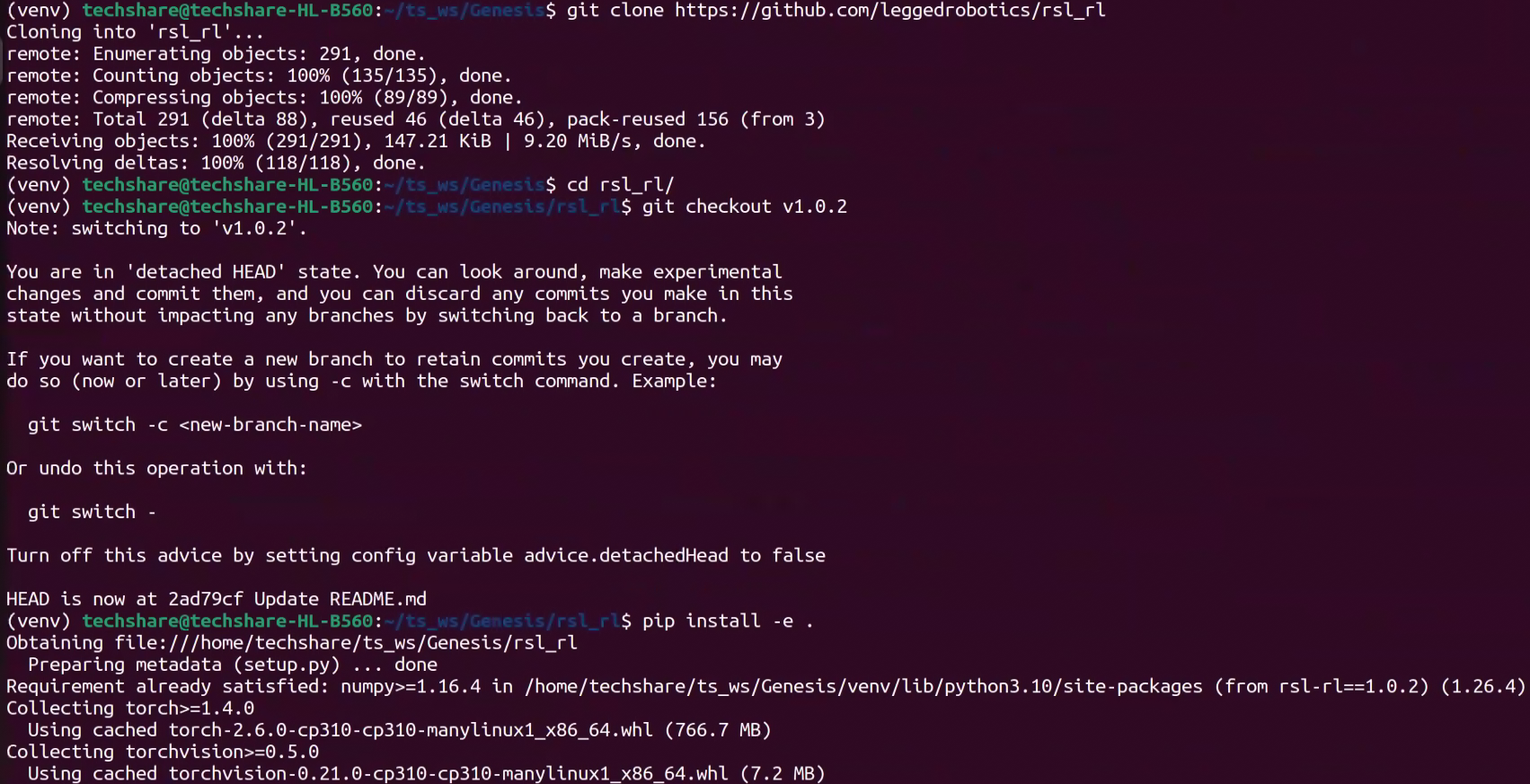
次に、強化学習のフレームワークであるRSL RLをgithubからクローンします。(Training Locomotion Policies with RL Genesis documentation)
tensorboardもインストールします。
git clone https://github.com/leggedrobotics/rsl_rl
cd rsl_rl
git checkout v1.0.2
pip install -e .
pip install tensorboard
pip install -e .まで
tensorboardをインストール
6. サンプルコードで訓練を行う
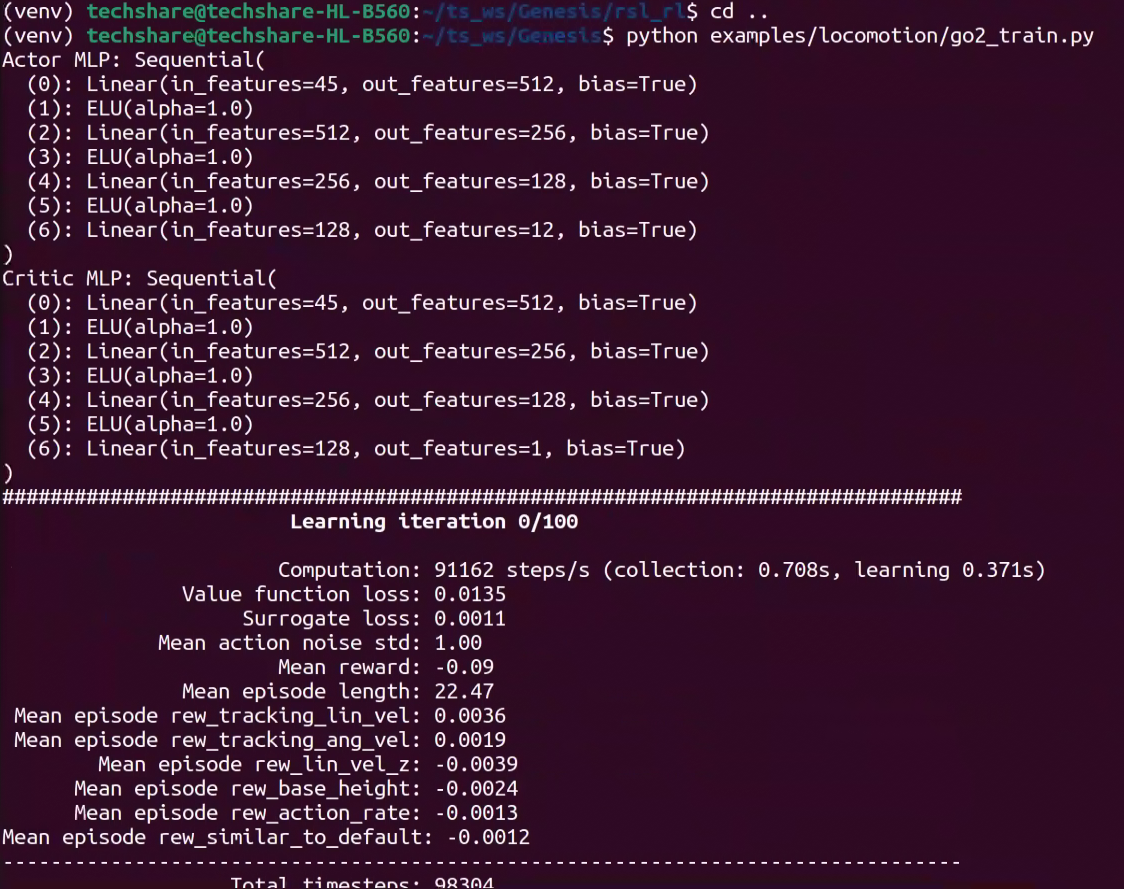
必要なものをインストールできたので、いよいよサンプルコードで訓練します。
今回はexamples/locomotionにあるgo2_train.pyを実行します。
また、tensorboardで学習の様子を確認することができます。
cd ..
python examples/locomotion/go2_train.py
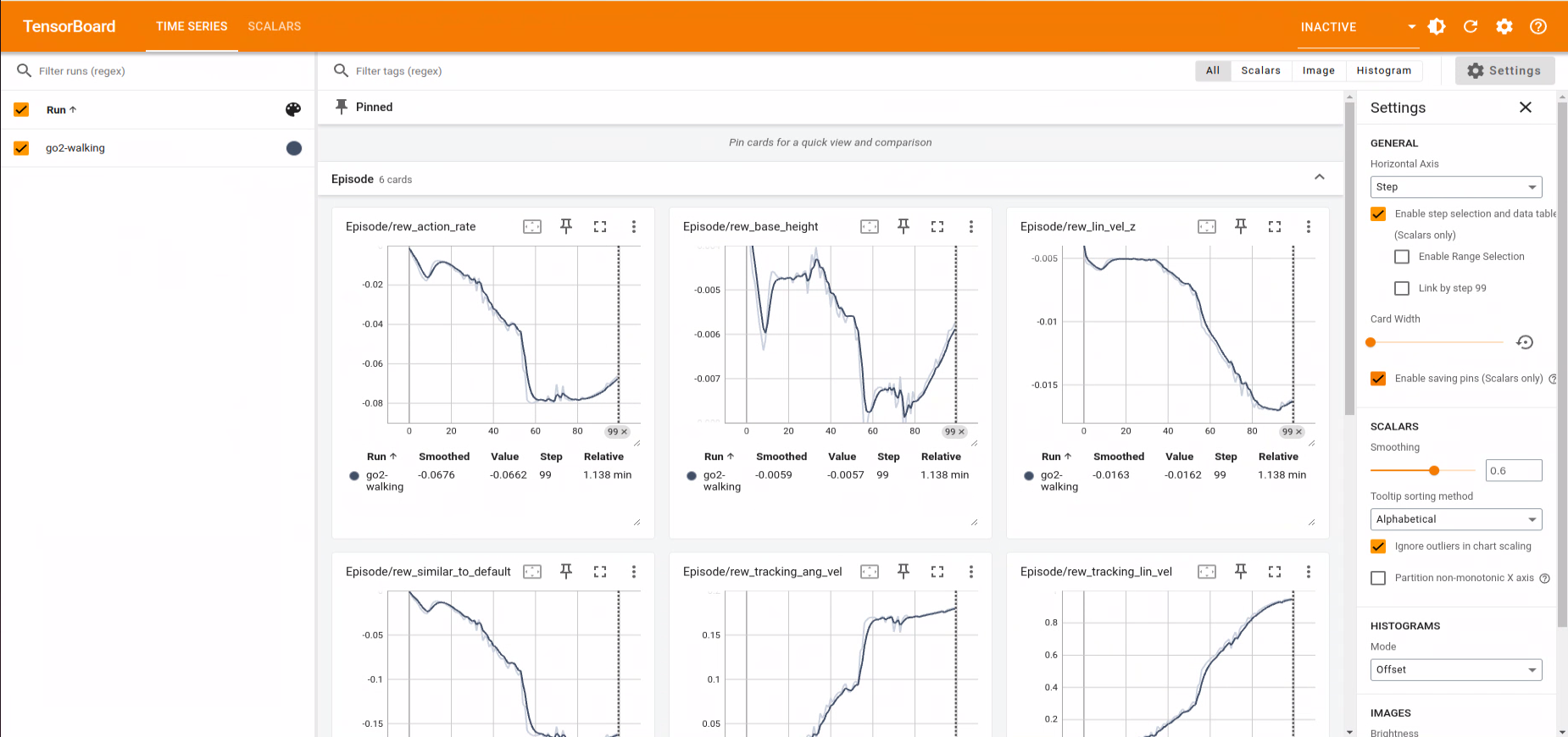
また、tensorboardで学習時の報酬の様子を確認することができます。(別のターミナルを開きます。)
tensorboard --logdir logs

ブラウザでlocalhostにアクセスすると、
7. 訓練したモデルの確認
最後に、訓練したモデルを用いてGo2の歩容を確認します。
examples/locomotionにあるgo2_eval.pyを実行します。
python examples/locomotion/go2_eval.py
おわりに
以上Genesisのインストール手順を見てきました。
別の記事にて、Go2の実機で訓練したモデルの確認を行う予定です。
また、弊社は、Unitreeの正規代理店をしており、Go2などの四足ロボットやG1などのヒューマノイドロボットの販売を行っております。
ご興味がありましたら、個別で連絡をいただけると対応いたします。
この記事が少しでも役に立てたのなら幸いです。