
初めに
本記事では、Unitree Go2を購入されたお客様からよくあるご質問内容を、一問一答形式でまとめたものになります。
一問一答(すべての機種について)
- Q: Go2を歩かせると、右方向に行くことがあまりにも多いですがこれは正常ですか?
- Q: Go2本体にペイロードを背負った場合、何か設定しなければなりませんか?
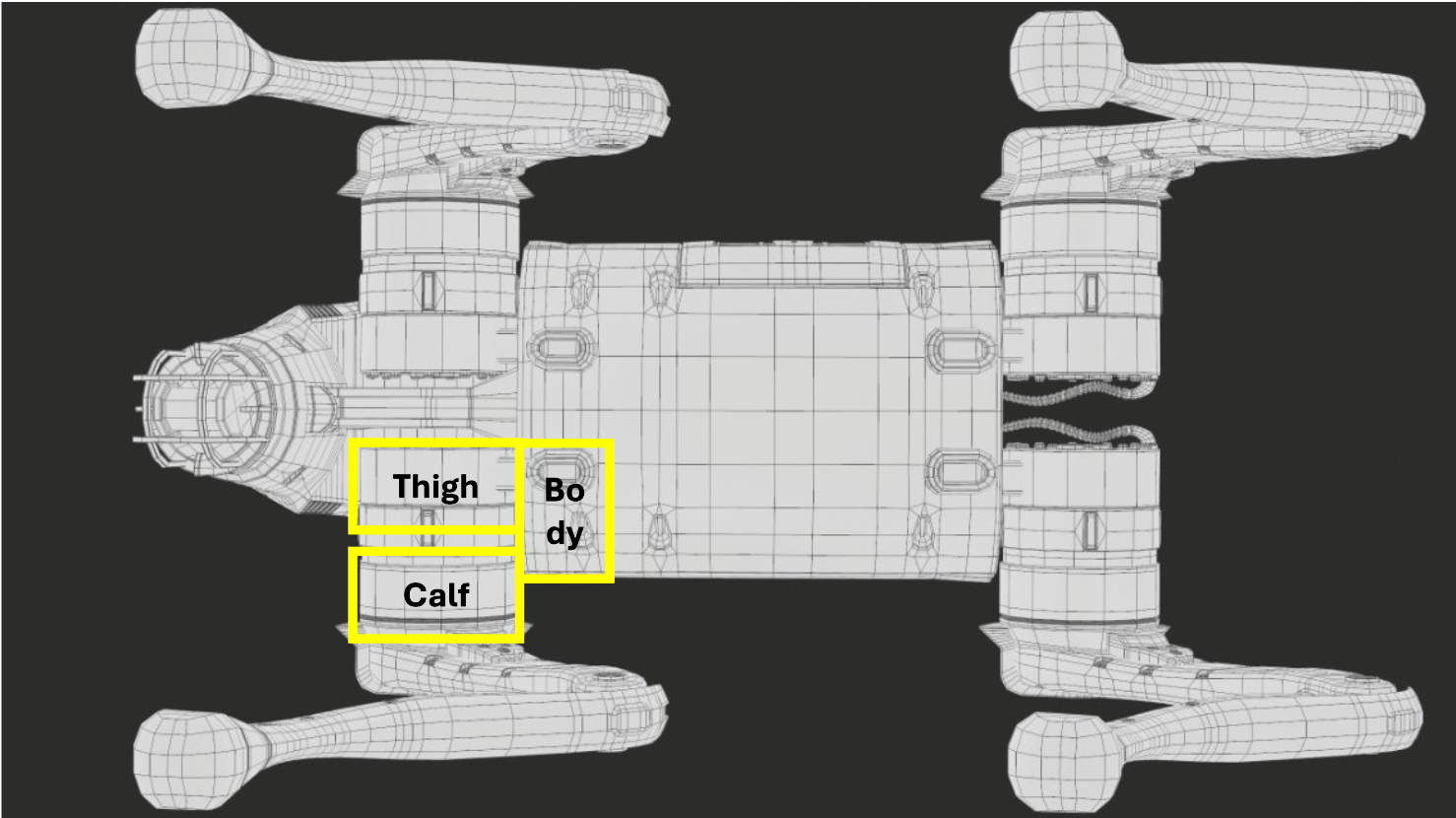
- Q: Go2のモータの数は12個とのことですが、本体のどのあたりにモータがあるのか?
- 各足の付け根に3つのモータが配置されています。
- 体の中にBodyモーターがあります。
- 足の付け根の部分に、さらに2つのモーターが配置されています。
- Q: Joystickコントローラー(Handheld Remote Control)のスティックの収納場所はどこですか?
- Q: 充電時間はどれくらいかかりますか。
A: 初期姿勢が少しずれていると、右に行きやすくなることは他のGo2でも確認されています。初期姿勢が正しいか今一度確認ください。
またキャリブレーションを行うことでさらに状況が改善することがあります。特にIMUキャリブレーションを行うとよいことが多いです。下記のリンクのようにスマホアプリからキャリブレーションを行ってください:
Unitree Go2 Calibration – YouTube
また一応、Offset Configurationから微修正も行うことができます。これはCalibrationの下のあたりから設定することができます。
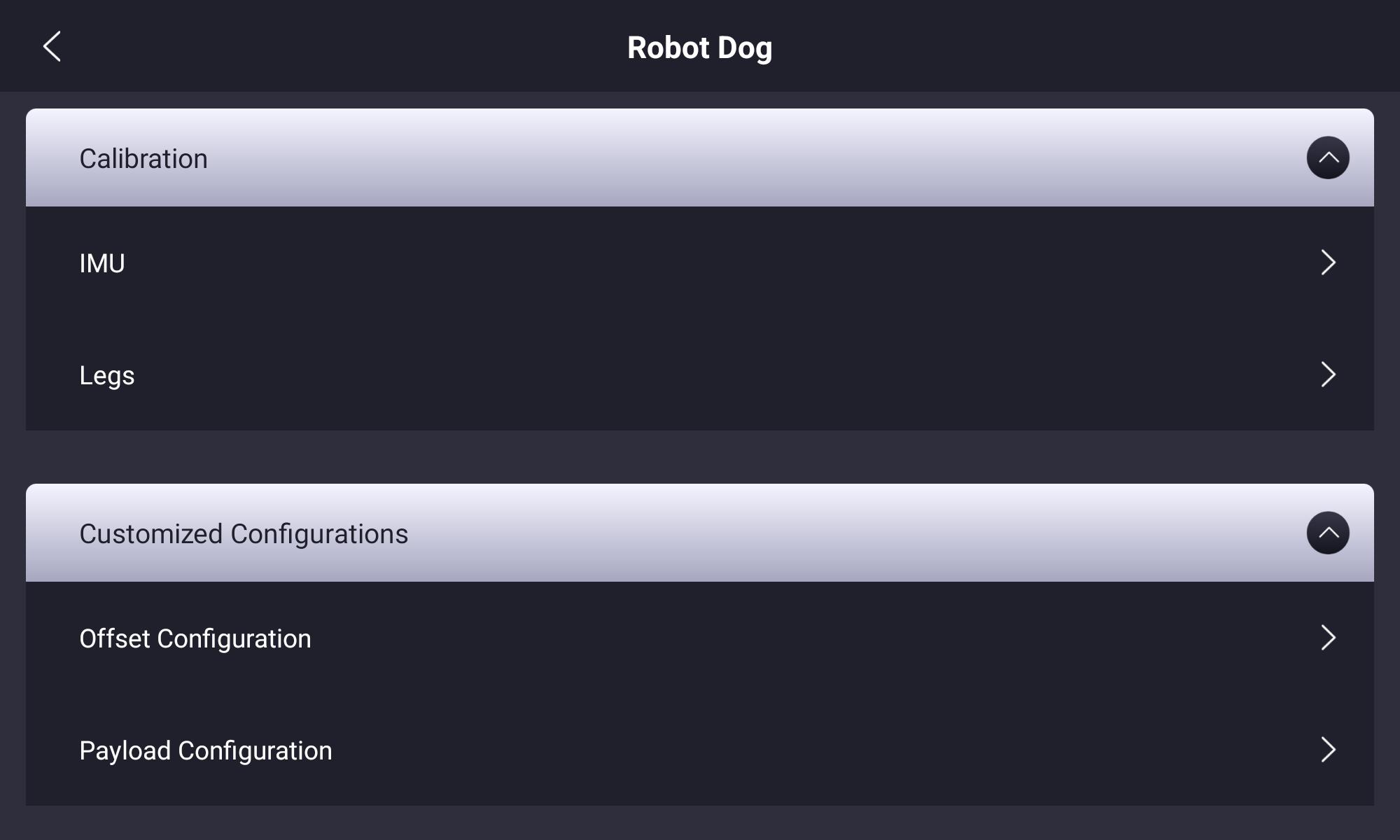
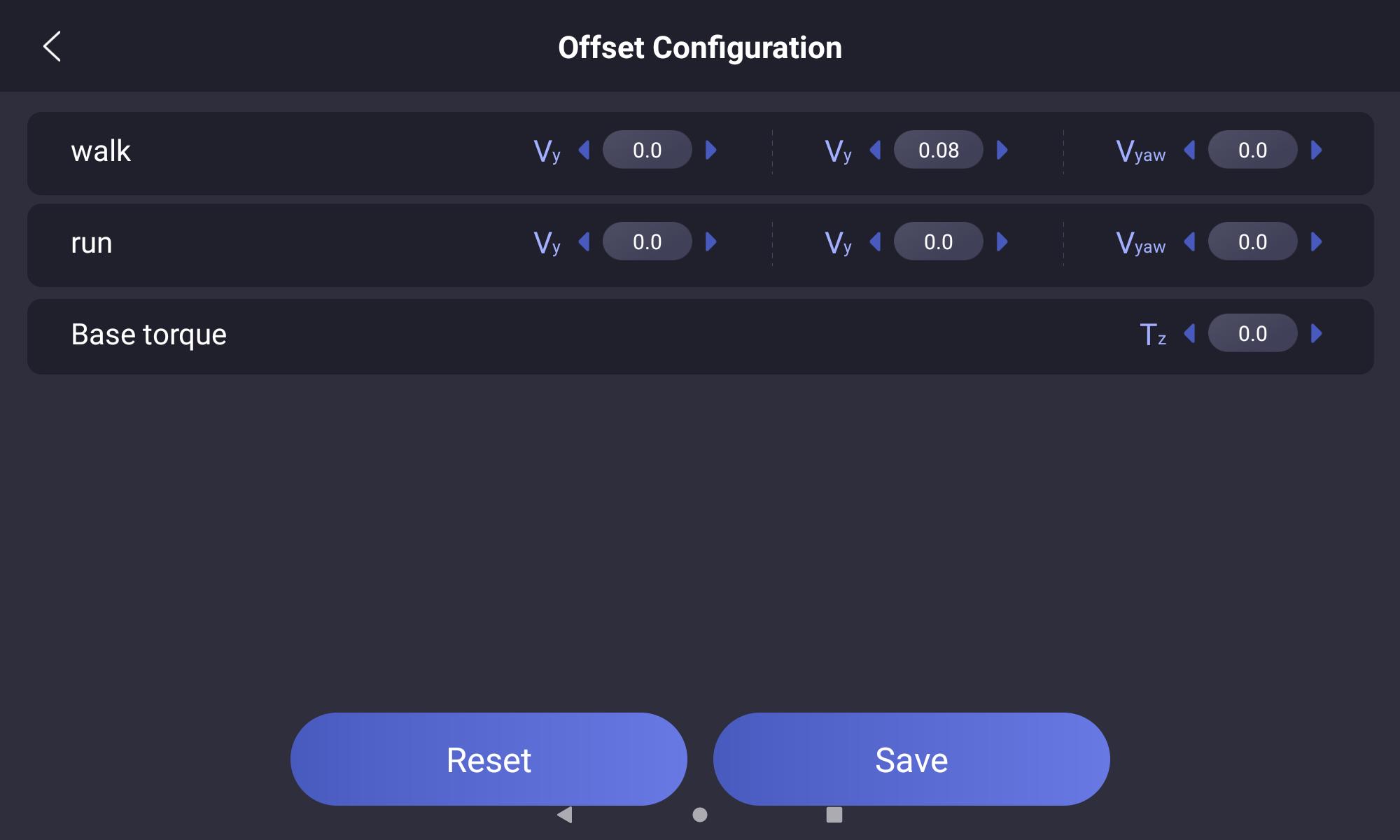
※この設定は再起動後も保存されます
A: Go2本体にペイロードを装着した場合、基本的には設定しなくても問題はありませんが、スマホアプリから「payload configuration」という設定をすることで、さらなる安定性を獲得することができます。これはCalibrationの下のあたりから設定することができます。
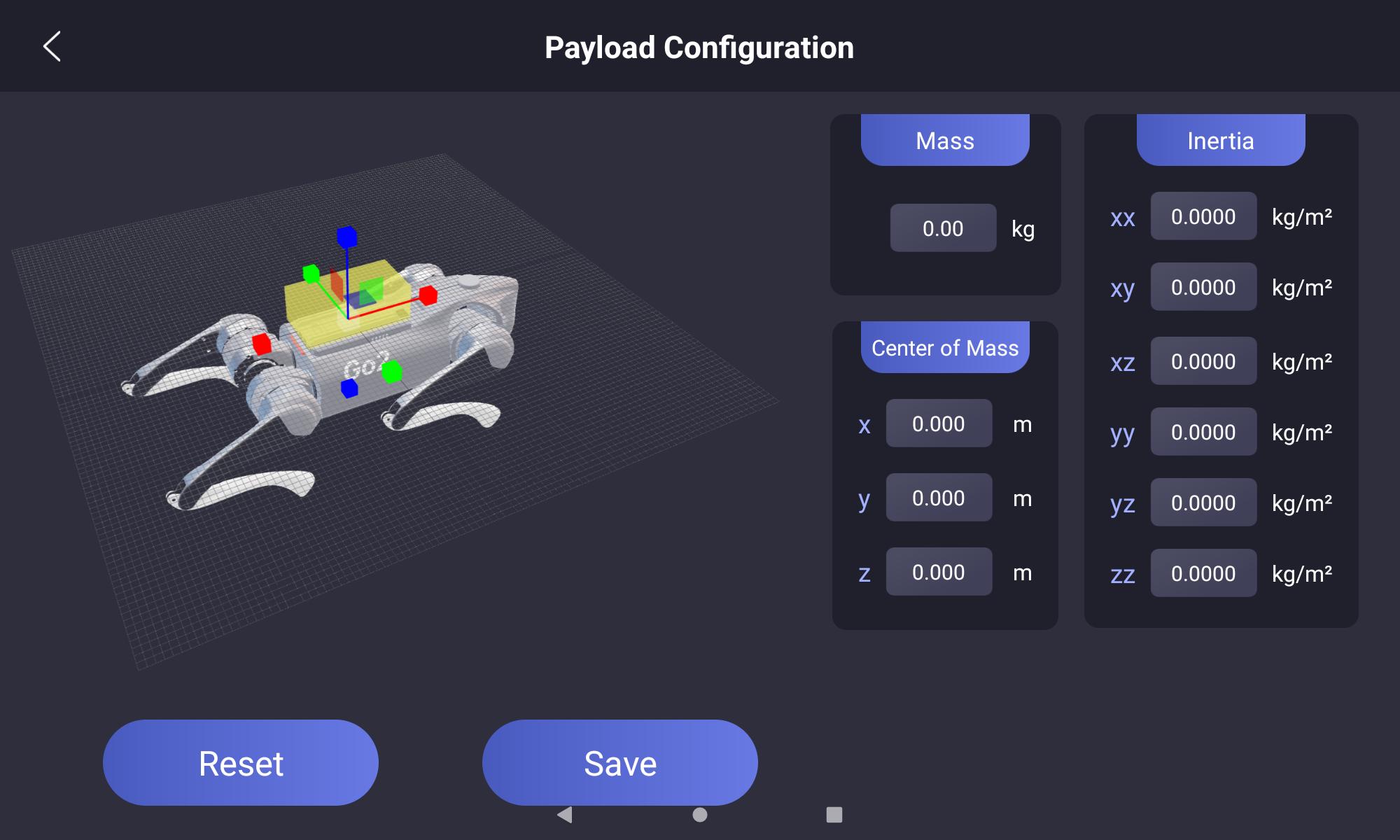
※この設定は再起動後も保存されます
A: Go2のモータは以下のように配置されています。
詳しくは下記の画像をご参照ください。
A: スティックの収納場所は下記のリンクからご確認いただけます。
joystick収納場所
A: 下図を参照ください。

一問一答(R&D版以上について)
- Q: R&D plusとR&D standardの確認方法は?
- Q: Go2 R&D版について搭載デバイスへのアクセス方法は?
- ユーザー名: unitree
- IPアドレス: 192.168.123.18
- パスワード: 123
- Q: D1の接続について、ログイン可能なUbuntu環境ですか?
- ユーザー名: ubuntu
- IPアドレス: 192.168.123.100
- パスワード: 123
- Q: 内容物のゴムはどのように使うのですか?
- Q: GO2のCADデータはどこで入手できますか?
- Q: Unitree製品のシミュレーション環境はありますか?
- Q: Go2 ロボットのフロントランプの色制御は可能ですか?
- Q: Mid360版購入の場合、SLAMサンプルはありますか?
- Q: ロボットのHandStrapは頭部側も取り外せるのですか?
- Q: ペイロードを追加する際の給電性能の制約について知りたいです。拡張ドッキングステーションからのDC給電で各電圧の供給可能な電流値と最大消費電力を教えてください。
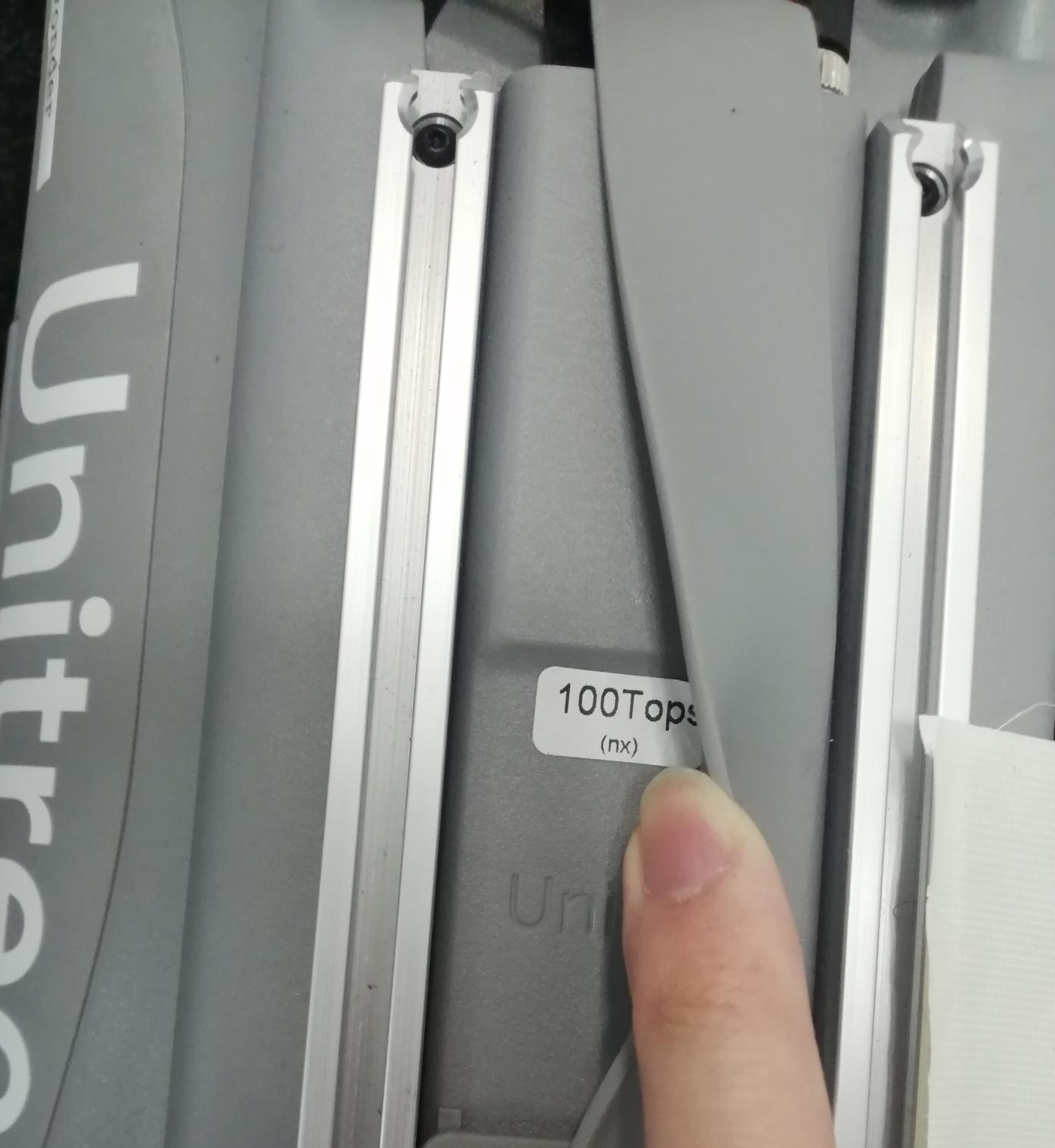
A: R&D plusおよびR&D standardのモデルを識別する方法は、背中のシールを確認することです。具体的には、シールに記載されている「100TOPS」がR&D plusモデルを、「40 TOPS」がR&D standardモデルを示しています。この情報を確認することで、お持ちの製品がどちらのモデルに該当するかを判断することができます。
コマンドラインで行う場合は、lscpuでコア数を判断するなどの方法があります。下記はplus(Orin NX)の場合です。
unitree@ubuntu:~$ lscpu
Architecture: aarch64
CPU op-mode(s): 32-bit, 64-bit
Byte Order: Little Endian
CPU(s): 8
On-line CPU(s) list: 0-7
Thread(s) per core: 1
Core(s) per socket: 4
Socket(s): 2
Vendor ID: ARM
Model: 1
Model name: ARMv8 Processor rev 1 (v8l)
Stepping: r0p1
CPU max MHz: 1984.0000
CPU min MHz: 115.2000
BogoMIPS: 62.50
L1d cache: 512 KiB
L1i cache: 512 KiB
L2 cache: 2 MiB
L3 cache: 4 MiB
Vulnerability Itlb multihit: Not affected
Vulnerability L1tf: Not affected
Vulnerability Mds: Not affected
Vulnerability Meltdown: Not affected
Vulnerability Spec store bypass: Mitigation; Speculative Store Bypass disabled via prctl
Vulnerability Spectre v1: Mitigation; __user pointer sanitization
Vulnerability Spectre v2: Not affected
Vulnerability Srbds: Not affected
Vulnerability Tsx async abort: Not affected
Flags: fp asimd evtstrm aes pmull sha1 sha2 crc32 atomics fphp asimdhp cpuid asimdrdm lrcpc dcpop asimddp uscat ilrcpc flagmなどで確認可能です。
なお、下記のコマンドではOrin NXの場合でも、NVIDIA Orin NX Developer KitとNVIDIA Orin Nano Developer Kitの両方が確認されていますので、判断には使えません。
unitree@ubuntu:~$ cat /sys/firmware/devicetree/base/model
NVIDIA Orin NX Developer Kit
A: 背面に搭載されたDocking Station(Jetson Orin Nano/NX)にはアクセスが可能です:
このデバイスには、ユーザー側からアクセスすることができます。一方、Go2内部にはIPアドレス192.168.123.161を割り当てられた別のコンピューターが存在しますが、こちらはSSH接続には対応していません。
参考になるURLは以下のとおりです:
A: はい、D1については、Ubuntu環境でのログインが可能です。D1へのアクセス情報は以下の通りです。
この情報を使用して、Go2がない状態でもD1にアクセス/使用することが可能です。
参考URLとして、以下のサイトがあります。
これらのリソースを参照することで、D1の設定や操作に関する詳細情報を得ることができます。
A: 同梱されているゴムは、ケーブルを固定するために設計されています。具体的には、真ん中にある3つのスリットにネットワークケーブルなどを挟み込むことで使用します。このゴムは、一般的にDocking Stationを使用する際には必要とされない部品です。ケーブルの整理や固定が必要な場合にのみ使用してください。

A: GO2のCADデータは、以下のリンク先で入手可能です。
1. Obtain SDK – Unitree
2. GitHub上のUnitreeの公式リポジトリでも利用可能です:unitree_ros/robots/go2_description at master · unitreerobotics/unitree_ros (github.com)
A: はい、以下のシミュレーション環境があります。ただし、いずれもHighLevel制御はサポートされておらず、LowLevel制御のみ対応しています。
1. GazeboシミュレーターでのGo2の動作
– 概要: Gazeboシミュレーターを使用してGo2を動作させることが可能です。
– 対応状況: ROS1に対応しています。
– リンク: unitree_ros
2. MujocoでのGo2のシミュレーション
– 概要: Mujoco上でROS2を使用してGo2のシミュレーションが可能です。
– 対応状況: ROS2に対応しています。
– リンク: unitree_mujoco
A: Go2 ロボットのフロントランプの色についての制御は現在、サポートされていません。これは、システムの状態表示に使用されているためです。例えば、障害物回避機能がONの場合は緑色、OFFの場合は青色、オーバーヒート時には赤く点滅するなどの機能があります。今後のアップデートで機能拡張が行われる可能性はありますが、現在のところは制限されています。
A:
メーカーが用意しているMid360のデフォルトサンプルにつきましては、メーカーと何度もやり取りしたのですが、結局うまく動きませんでした。(SLAM Navigation_service – Unitree、【Unitree Go2】Mid360のデフォルトサンプルの使い方(現在作成中です))
メーカーが用意しているものについてはソースコードもかなり隠されてしまっているということも加味し、弊社でSLAMサンプルの用意をすることにいたしました。下記よりご参照ください。
・Mid360の実行:
【Unitree Go2】Mid360を動かしてみる– TechShare FAQ
・Mid360 on Go2によるSLAMの実行:
前編:【Unitree Go2】Mid360でSLAMを実行する– TechShare FAQ
後編:【Unitree Go2】Mid360 on Go2でFAST-LIOを使う– TechShare FAQ
A: ロボットのHandStrapは、後方部分がネジで外れるようになっておりますが、頭部側も取り外すことが可能です。ふたを外すことで取り外しができる設計となっています。詳しい取り外し方については、下記のリンクのビデオガイドをご参照ください。ビデオガイドを見る
A: 拡張ドッキングステーションからの給電の性能については、以下の資料をご参照ください:
宇树科技 文档中心 (unitree.com)
おわりに
本記事ではよくあるご質問内容を見てきました。
この記事が少しでも役に立てたのなら幸いです。