
MG400のアームに給電を行うと、手先部分のJ4軸となるモーターから振動や異音が発生する場合があります。
本稿では、本現象についての原因と対処法を記載しています。
MG400はアームの給電時に、荷重パラメータを設定する必要があります。
荷重パラメータにはペイロードとオフセットの二つの項目があり、ペイロードはエンドエフェクターを含めた荷重、オフセットはJ4軸を0°にしたときのエンドエフェクタの重心位置(x,y)となります。
これらの設定が実際の荷重に対し比較的大きい場合に、J4のモーターから振動と異音が発生する場合があります。
特にエンドエフェクターを外した際にペイロードを変更し忘れるケースが発生しておりますので、ご注意ください。
また、オフセットはJ4軸からの距離が40mmまでとなっておりますので、もしワークを運ぶ際に重心位置が40mm以上となる場合は、手先が振動したり、目的座標への移動がうまくいかないなど不具合が発生する可能性がございますのでご注意ください。
この場合はエンドエフェクタを工夫して重心位置が40mm以内になるようにしていただけますようよろしくお願いいたします。
J4軸についての詳細は以下をご覧ください。
[MG400]減速機付きと標準品の違い – TechShare FAQ
荷重パラメータの変更方法
・Dobot Studio Pro(2020)をご使用の場合
Settings > Load Params を開いていただくことにより、変更することができます。Payloadに適切な重量を入力してください。
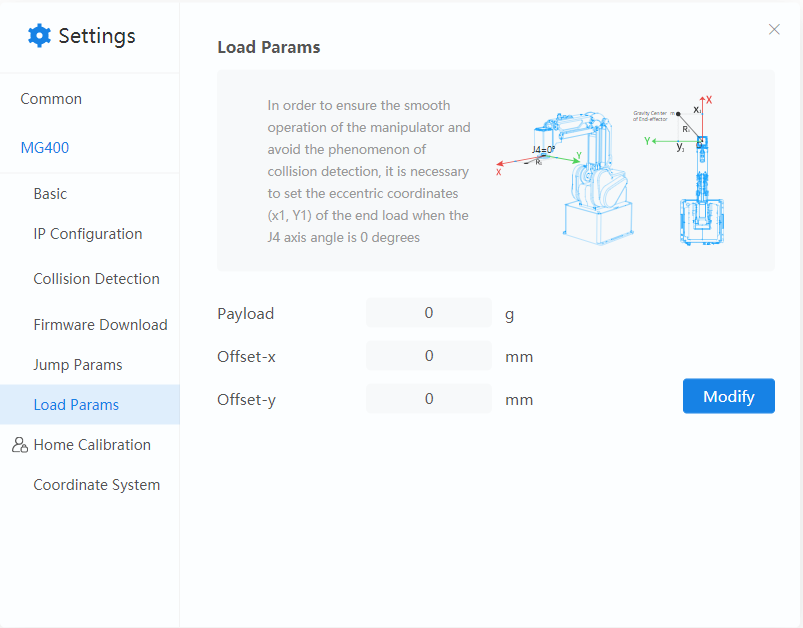
また、Offset-x, Offset-yでは荷重の重心を変更することができます。エンドエフェクターが正常に動作しない場合は、こちらの設定をご確認ください。
・SCStudioをご使用の場合
Settings > Load Params を開いていただくことにより、変更することができます。LoadValueに適切な重量を入力してください。
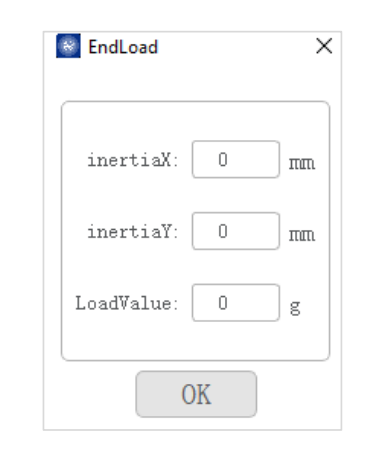
また、inertiaX, inertiaYでは荷重の重心を変更することができます。エンドエフェクターが正常に動作しない場合は、こちらの設定をご確認ください。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。