

本記事では,DOBOT社から発売されております6軸ロボットアーム CR5をご紹介いたします.また,作業を行うための3rdパーティ製のエンドエフェクタを使用するための方法についてもご説明いたします.
内容
目次
製品紹介
DOBOT CR5は,安全柵がなしで人間と協働作業ができる「協働ロボット」に分類される新世代の6軸ロボットアームです.
繰り返し精度0.03mm,ペイロード(可搬能力)5kgを誇り,可搬能力と正確性が売りの産業用ロボットの利点と,衝突検知機能や直感的な操作が可能なインターフェース設計による安全性と操作性が確かな協働用ロボットの利点を併せ持っています.
また,ロボットアームの手先には対象へアプローチするためのエンドエフェクタが必要となりますが,CR5では,コントローラにI/Oポートを有しているため,エンドエフェクタに他社の製品を使用することもできます.そのため,様々なエンドエフェクタのなかから対象に適したもの選択することで,幅広い作業に対応し,生産性の向上に貢献できます.
今回,ご紹介のために実際にCR5が作業を行う様子をYoutubeへ動画を投稿いたしました.動画では,横倒しに並べられているドミノピースを自らたてて並べ,ドミノ倒しを行う作業を行っております.
以下では,機器の準備からプログラミング,実行までの手順を説明いたします.説明では他社製のエンドエフェクタを操作するための手順についても触れておりますので,ご参考ください.
-
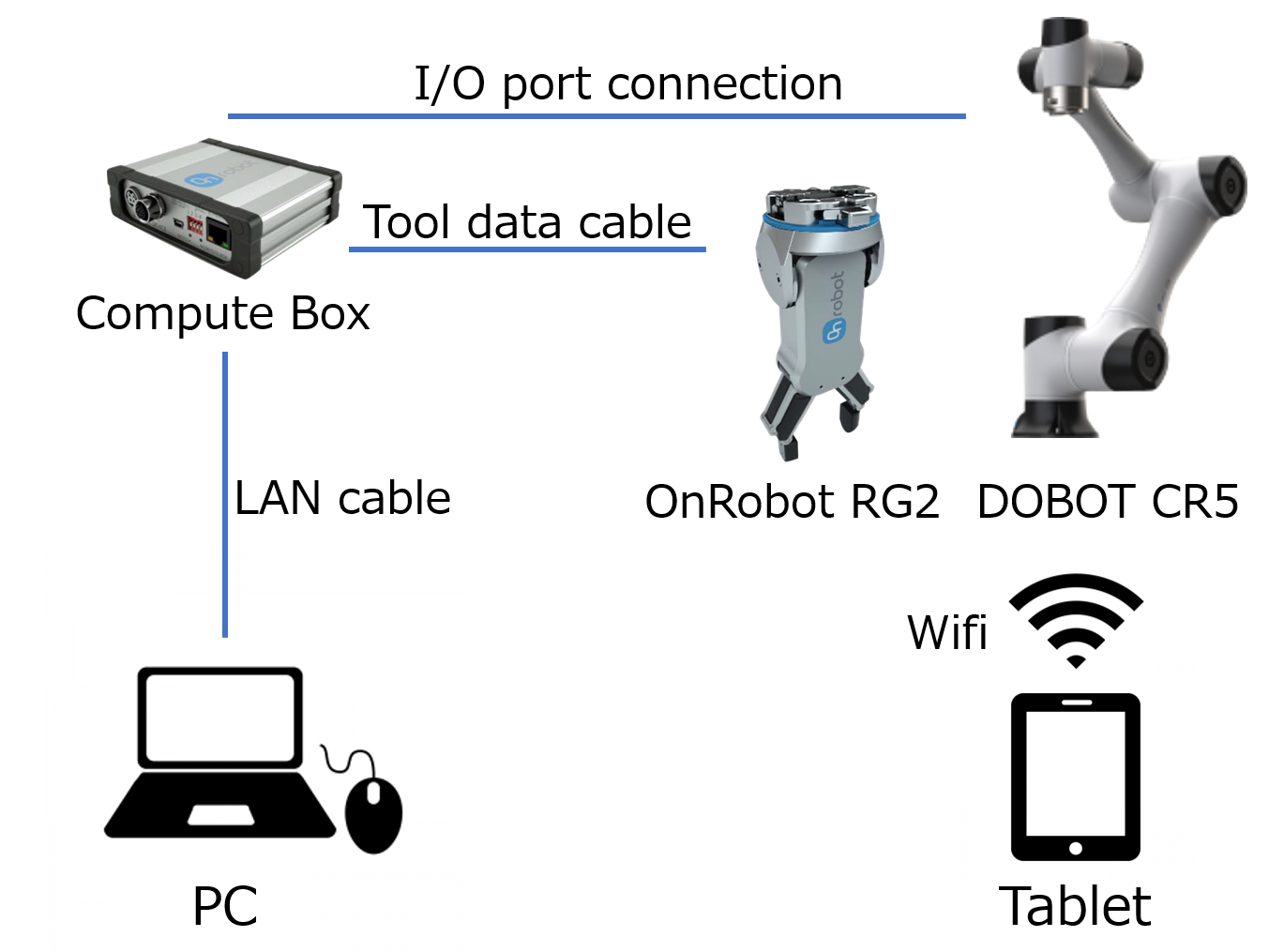
システム構成図
システム構成図は以下のようになります.
使用機器
使用機器は以下になります.
ロボットアーム CR5(DOBOT)
- CR5本体
❑ ペイロード :5kg
❑ リーチ :109.6cm
❑ 繰り返し精度:0.02mm
❑ 最大速度 :3.0m/s
❑ 本体重量 :23kg
CR5についての詳しい紹介と,弊社で取り扱っておりますDOBOT社のそのほかのロボットアーム一覧はこちらとなります.
協働ロボット DOBOT CR5 | TechShare株式会社
DOBOT CR – Physical Computing Lab
- コントローラ
ロボットアーム CR5の制御のほか,I/Oポートにより他の機器の制御や連携した作業を行うことが可能です.
- Jumper Wire
ロボットアーム CR5とグリッパー RG2のI/Oポートを接続するために使用します.
- タブレット(今回はAndroidを使用)
ロボットアームを制御するために使用するDOBOT CRStudioを操作するために使用します.Google Playより推奨スペックは Android7.0以上となっております.今回は以下の端末を使用いたしました.
使用端末:HUAWEI honor tablet 5 (Android 8.0, RAM3GB)
使用アプリケーション:DobotCRStudio – Google Play
[OFFICIAL]Dobot Download Center – Download Dobot Softwares and Files
グリッパー RG2(OnRobot)
OnRobot社では軽量な協働ロボットアームのための高性能なエンドエフェクタを提供しており,ワンタッチで着脱可能となるコネクタ (QuickChanger) を手先に取り付けることで,OnRobot社製のそのほかのさまざまなエンドエフェクタの装着が可能となります.
今回の作業では,安定した把持を行うため,二本指のグリッパーRG2を使用いたしました.RG2は重量0.78kg,2kgペイロード,最大110mmストロークの柔軟な協調型グリッパーで,独自のプログラミング開発環境により,ブラウザのみで簡単に制御を行うことが可能となっています.
- RG2本体
今回は二本指の開閉により対象物を把持可能であるRG2を使用しました.
❑ ペイロード :2kg
❑ ストローク :110mm
❑ 繰り返し精度:0.1mm
❑ 最大速度 :127mm/s
❑ 本体重量 :0.78kg
弊社で取り扱っておりますOnRobot社のエンドエフェクタ製品一覧はこちらとなります.
On Robot – Physical Computing Lab
- Compute Box
グリッパーと他のモジュールとの接続を中継することで円滑に制御を行えるように機能します.
- Tool data cable
エンドエフェクタとCompute Boxを接続し,制御できるようにするための専用の通信ケーブルです.
- QuickChanger
OnRobot社製のエンドエフェクタを装着するためのコネクタパーツです.ロボットサイドとツールサイドがございますので,それぞれをロボットアーム CR5とグリッパー RG2にお取り付けください.
- ACアダプター (24V)
- PC(今回はWindowsを使用)
グリッパーの開閉を制御するためのプログラムを実行するために使用します.
Compute BoxとEthernetを使用して通信します.ブラウザからすべて操作可能です.
- LANケーブル
手順
1. CR5のセットアップ
CR5のセットアップについては以下のユーザーガイドと合わせてご参照ください.
[OFFICIAL]Dobot Download Center – Download Dobot Softwares and Files
また,エンドエフェクタの装着のために,CR5の手先にQuickChangerを取り付けます.QuickChangerのロボットサイドを取り付けてください.その後,グリッパー RG2を装着します.RG2にはあらかじめQuickChangerのツールサイドが取り付けられておりますので,ねじ留め等の必要はありません.RG2裏側のツールサイドの爪の部分をロボットサイドのバーの部分にかけるようにして装着してください.
2. 各機器の配線
RG2 – Compute Box
Compute Boxがグリッパー RG2とロボットアーム CR5を中継することで,円滑に制御が行えます.Compute BoxとRG2との接続はTool data cableを,Compute BoxとCR5との接続にはJumper Wireを使用します.

注意として,こちらのケーブルは手先に装着されているRG2と接続されている都合上,コネクタ部分に非常に負担がかかります.動作によりケーブルが引っ張られますと,コネクタに力がかかり故障を招く原因となりますので,ケーブルバンドなどを用いて図のように余裕をもたせながらアームに添わせることで,コネクタを破損を防ぐようにする必要があります.手先部分はコネクタとともに回転する動きが可能があるため,特に注意して配線するようにお願いいたします.
Compute Box – CR5
CR5のI/OポートとCompute BoxのI/Oポートを接続します.
CR5 I/O port – Compute Box
0V - GND
I/O 17 – DI1
以下の図はCR5,Compute BoxそれぞれのI/Oポートです.
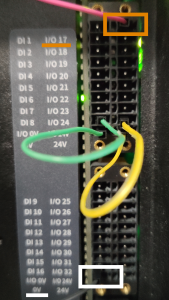

これらの色の同じポートを接続しています.デジタル出力/入力ポートであるI/O 17・DI1は作成するプログラムによりそのほかのポートを指定可能です.
CRシリーズのI/Oポートにつきましてより詳しい説明は動画がございますので,こちらをご参照ください.
協働ロボット DOBOT CRシリーズ I/Oの操作 – YouTube
Compute Box – PC
PCとCompute BoxをLANケーブルにより接続してください.
このとき,Compute BoxのLANケーブル接続口のライトが点灯していることを確認してください.
3. グリッパーRG2 制御プログラム実行
グリッパーとの接続には,WebClientを使用します.
Compute BoxとPCとの接続についてのより詳しい内容につきましては以下の記事をご参照ください.
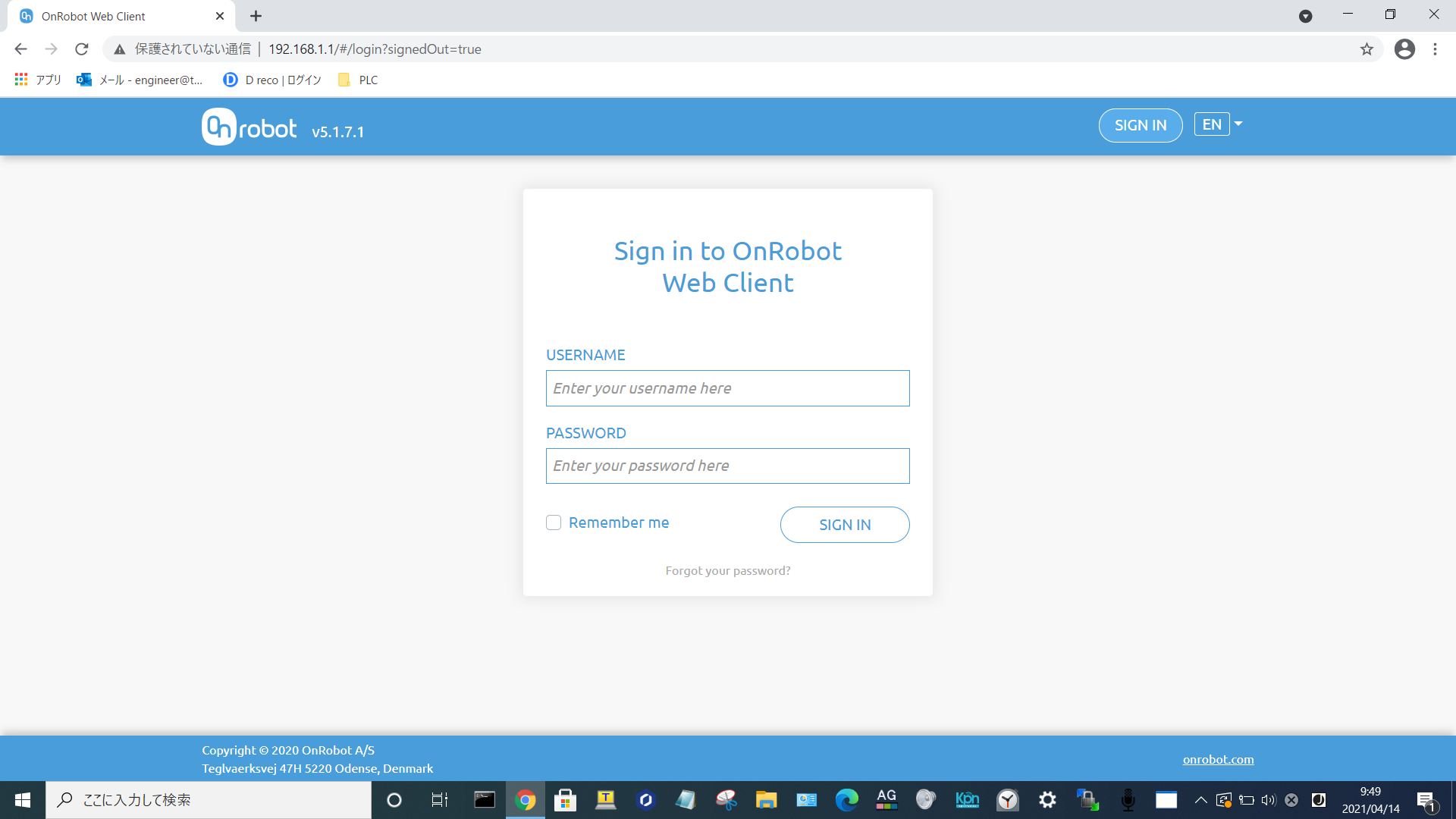
ご利用のブラウザでURL欄にCompute Box裏面に記載されているIPアドレス(192.168._._)を入力すると,WebClientページへ移動します.
接続が成功するとログイン画面が表示されますので,ユーザ名とパスワードを入力してください.
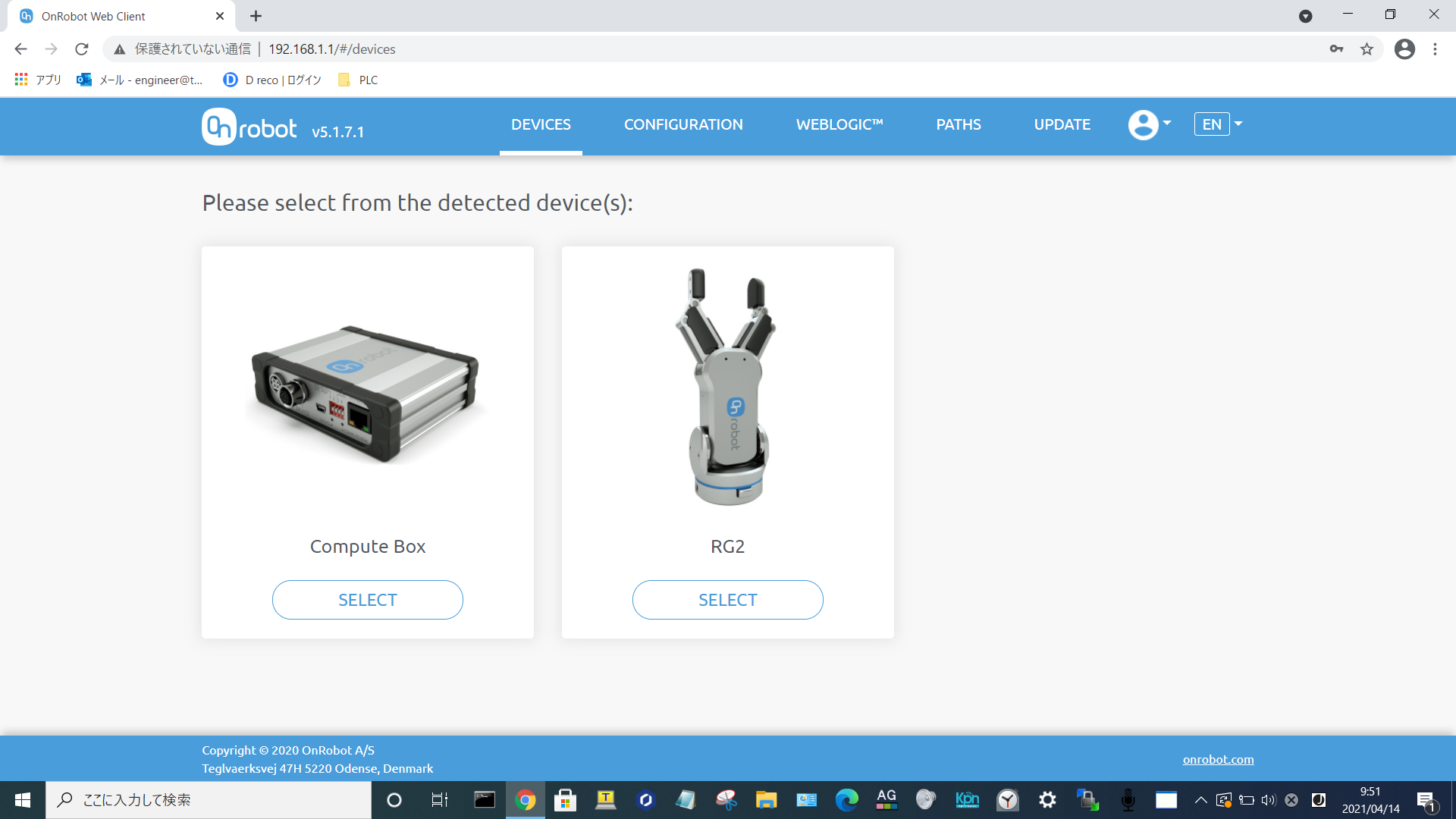
ログイン後,現在接続されているデバイス一覧画面が表示されます.こちらで目的のデバイスを選択し,状態の確認や画面上でGUIにより制御が可能です.
ログインできましたら,画面上部中央の”WEBLOGIC™”を選択してください.
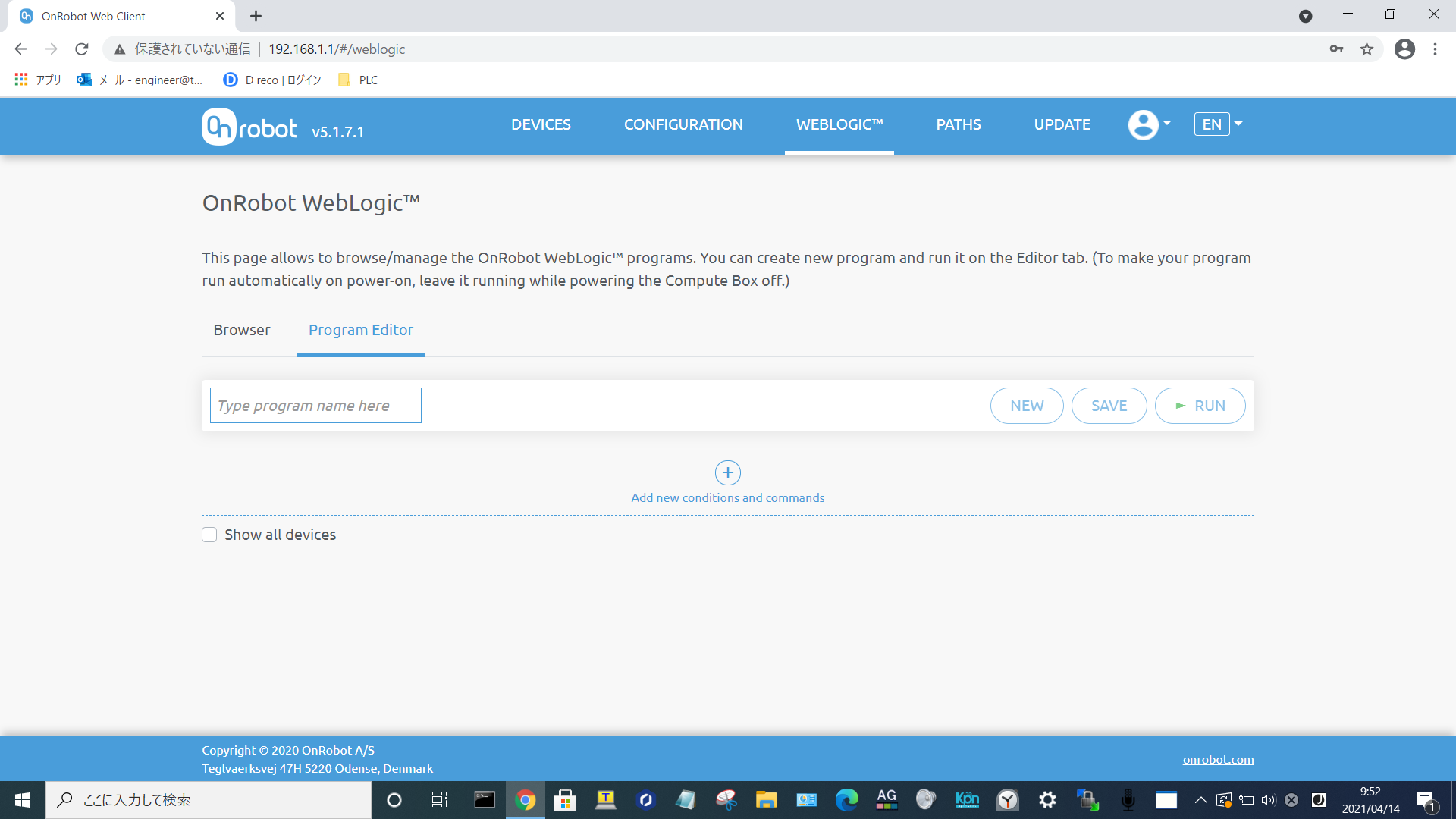
こちらはエンドエフェクタの制御をプログラミングすることができるWebLogicの画面となります.
制御方法としては,I/Oポートの状態やハンドの現在状態などを条件として設定し,その条件に応じた制御を行うことが可能となります.画面中央のAddボタンにより条件を追加できます.
今回はDI1へのデジタル入力がHIGHかLOWかにより,ハンドの開き幅が変わるようにしました.
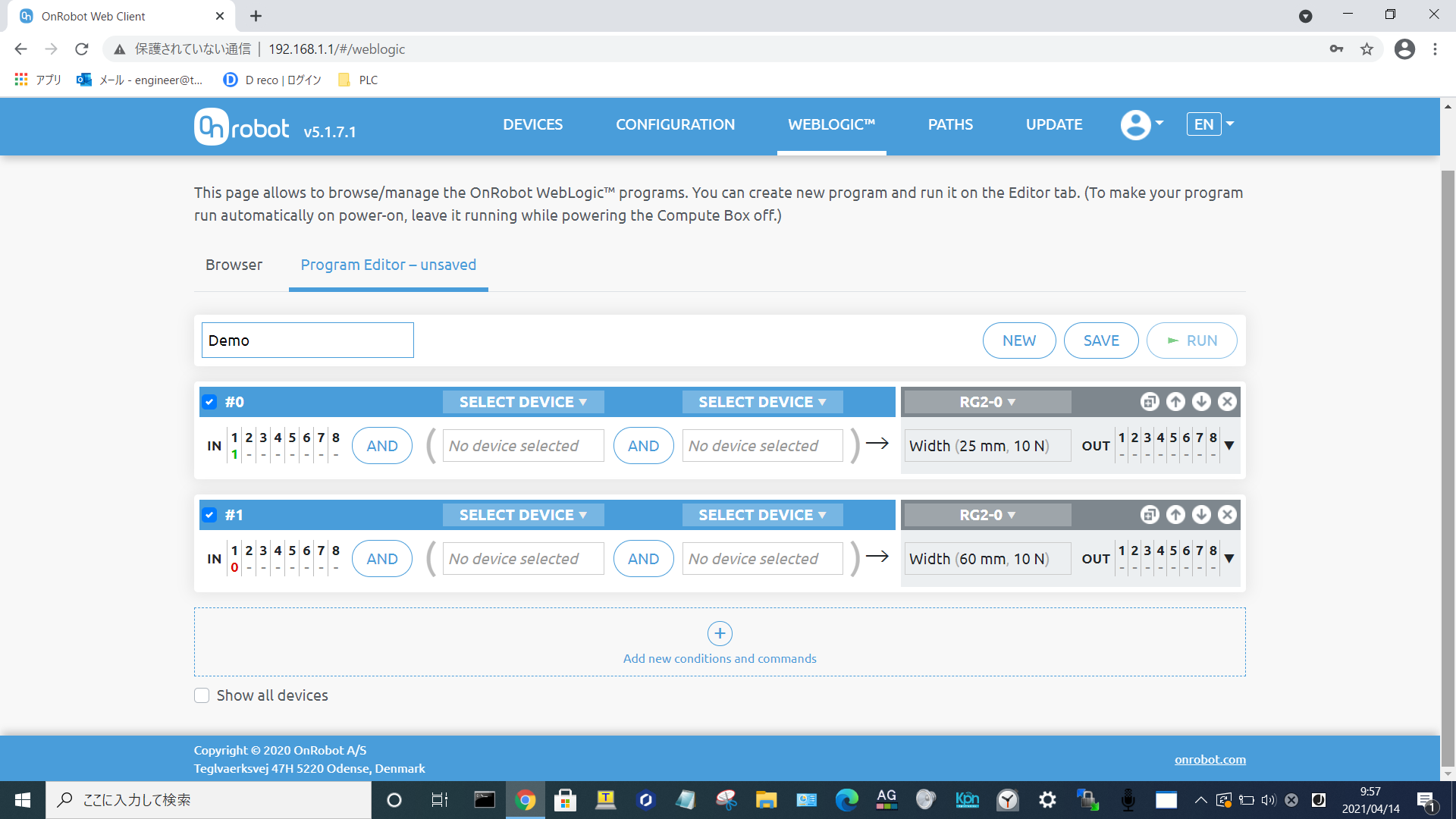
こちらはDI1のポートへのデジタル入力がHIGHかLOWかによってハンドの開閉の制御を行うプログラムとなっております.
図では,上から,
DI1への入力がHIGH(=1)の時,グリッパーRG2のハンド幅を25mmにする
DI1への入力がLOW(=0)の時,グリッパーRG2のハンド幅を60mmにする
というような条件と制御となっております.
こちらのプログラムを実行した状態にすることでRG2 のハンド開閉をI/Oポートにより制御が可能です.
作成したプログラムはSAVEボタンで保存した後に,RUNボタンでプログラムが実行されます.
ロボットアーム CR5でハンドを制御する前にあらかじめグリッパー側 RG2のプログラムを実行した状態にしてください.
4. ロボットアームCR5 制御プログラムの実行
最後に,実際にデモを行うCR5の制御プログラムを実行します.
今回はAndroidアプリ版のCRStudioを使用してタブレットからCR5の操作を行っております.プログラムは,アプリ上でBlocklyを用いて開発いたしました.以下はダウンロードサイトのリンクとなります.
[OFFICIAL]Dobot Download Center – Download Dobot Softwares and Files
DobotCRStudio – Google Play のアプリ
CR5では,簡単なプログラミングからアプリを介さず,手先上部にあるボタン操作のみでハンドティーチング,モーショントレースを行うことも可能であり,6軸ロボットアームをご利用が初めての方であっても使いやすいロボットアームとなっております.
今回の作業では,アームの移動先の各点についてあらかじめハンドティーチにより指示し,プログラム上に各点をp1,p2…として保存しています.そしてそれらの点をBlockly内で使用しています.
CR5の使用方法やハンドティーチングによるプログラミングにつきましては以下の記事にて紹介しておりますのでご参照ください.
協働ロボット DOBOT CRシリーズ Blocklyでの操作 – YouTube
協働ロボット DOBOT CRシリーズ ダイレクトティーチング – YouTube
今回はデジタル出力信号のON/OFFによりハンドを制御いたしますので,ハンドと接続されているCR5のI/Oポート17番からデジタル出力するようプログラムすることで,ハンドの開閉を制御が可能です.
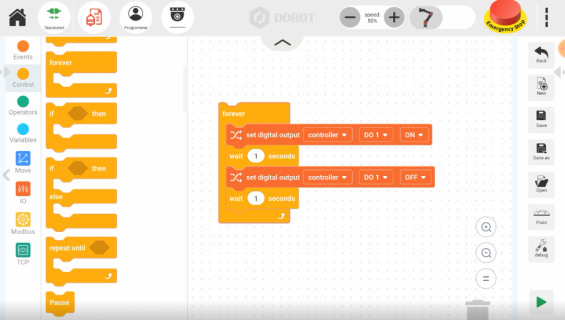
図は,Blocklyによりデジタル出力を制御している例を示しています.
今回はI/O 17ポートを使用しております.プログラム上ではDO1として取り扱われるため,デジタル出力を制御するブロックでDO1を指定することでON/OFF制御=ハンドの開閉が制御できます.
こちらのプログラムを右下のRUNボタンで実行いたしますと,一秒ごとにグリッパーが開閉を繰り返します.
 Blocklyデモプログラム
Blocklyデモプログラム
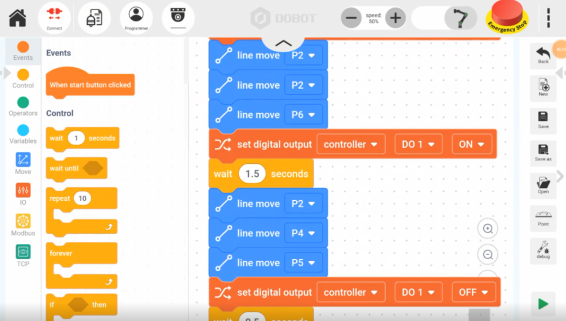
こちらの図は今回のデモプログラムの一部を示しています.
図のプログラムの流れは以下の物体の移動のための処理となります.
対象物(ドミノピース)の上へ移動
↓
I/Oのデジタル出力ONによりアーム閉
(アーム閉まで待機)
↓
目標点(ドミノ倒しを行う点)へ移動
↓
I/Oのデジタル出力OFFによりアーム開
(アーム開きまで待機)
この一連の処理をループによりドミノピースの数だけ繰り返し行うことで,横向きに置かれているピースを持ち上げ,ドミノを完成させることができます.
最後に手先でドミノを倒して一連の作業は終了です.
今回はDOBOT CR5について,ドミノを自ら組み立て倒すという作業を例にご紹介いたしました.CR5が要求される作業に対し,3rdパーティ製のエンドエフェクタを組み合わせることによって,様々な作業に対して幅広く対応することが可能となります.