

1. はじめに
本稿ではE6の設置手順をご案内します。
2. ロボットアームの導入手順
2-1. 箱の開封
E6を購入すると、ロボットアームを動作させるための様々な同梱物が付いてきます。
下記動画で箱の開封から、同梱物の紹介までを行っています。
※動画内で紹介されているMG400向けエンドエフェクタ取付用変換フランジはオプション品となります。必要な場合は別途購入する必要がございますので、ご注意ください。
2-2. ロボットアームの設置
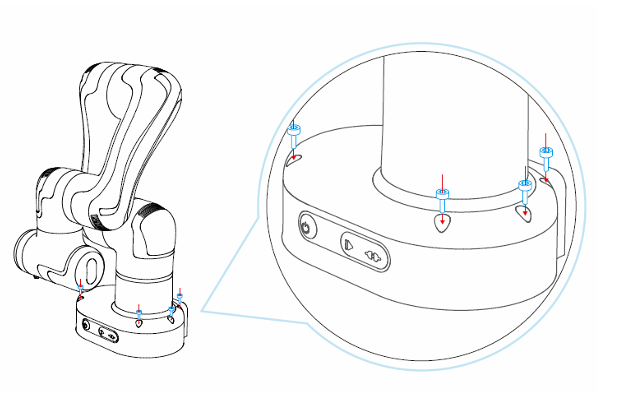
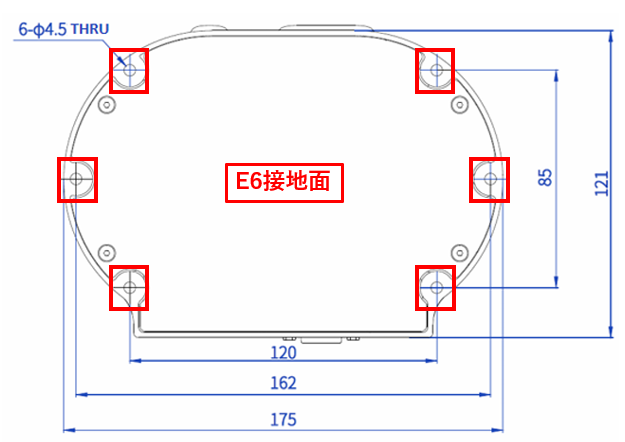
E6は付属のE6専用マウントプレートにM4の六角穴付きボルト6本で固定します。
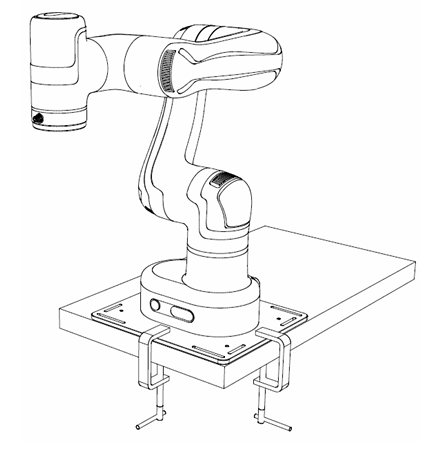
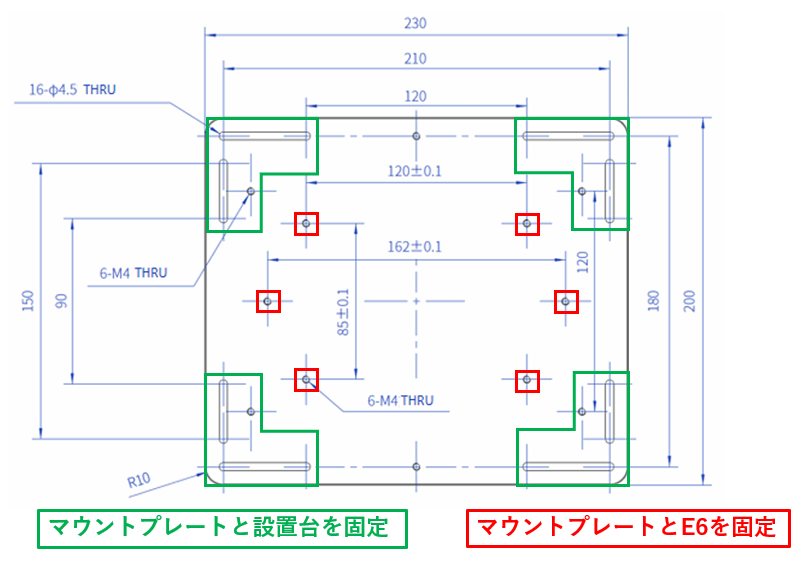
E6専用マウントプレートは設置台に固定してください。
固定する際は付属のG型クランプか、M4の六角穴付きボルトをご使用ください。
G型クランプで使用する場合は左図のように固定、M4ボルトを使用する場合は右図の緑枠で囲われた部分で固定してください。
[注意] 設置台は、E6の重量だけでなく、最大加速度運動の動力に耐える剛性が必要です。
[注意] E6の移動軌跡が動作中に妨げられないような位置に設置してください。
2-3. ケーブルの接続
次の画像に従って、E6に必要なケーブルを接続します。
① 非常停止スイッチを接続します。
② 電源アダプタを接続します。
③ 有線で接続する場合はLAN1にLANケーブルを、無線で接続する場合はUSB1にUSBドングルを接続します。
④ 電源ケーブルを接続します。
⑤ E6の前面の電源スイッチを押し、電源を入れます。
E6の手先のランプが青点滅から青点灯に変わると起動完了です。
[備考] E6の手先のランプが赤色に点灯している場合は、非常停止ボタンが押されている可能性があります。非常停止ボタンの赤いボタンを右方向に回転させることで、押下状態を解除することができます。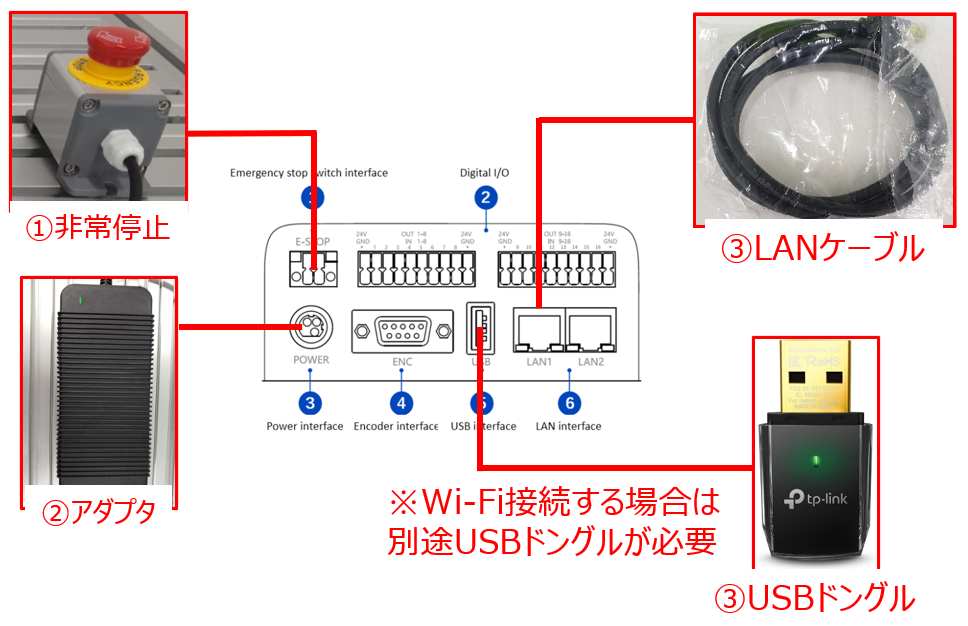
ここまでの操作が終われば、次はE6を制御するための専用ソフトウェア「DobotStudio Pro」との接続を行います。
下記の記事に詳細をまとめていますので、よろしければこちらもご参照ください。
何かご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。