
アームに強い衝撃を加えた場合など、MG400の原点位置がずれてしまった場合には、ホームキャリブレーションが必要となります。
本稿では、MG400に同封されているキャリブレーションツールの使用方法を記載します。
注意:通常のプログラムでホーム位置を変更したい場合には、ユーザー座標系(User Coordinate)を使用してください。
(1)キャリブレーションには、MG400に同梱されているZero Position Fixtureというツールを使用します。次の資料を参照し、ご用意ください。
MG400 shipping list cn&en 20200112
手動での調整には、ハンドティーチボタンを使用します。
(2)1軸の原点を調整します。
まず、アームの方向をMG400の前面に向けます。下図のようにキャリブレーションツールを基台の端に当てて、アームが真正面を向くよう調整を行ってください。

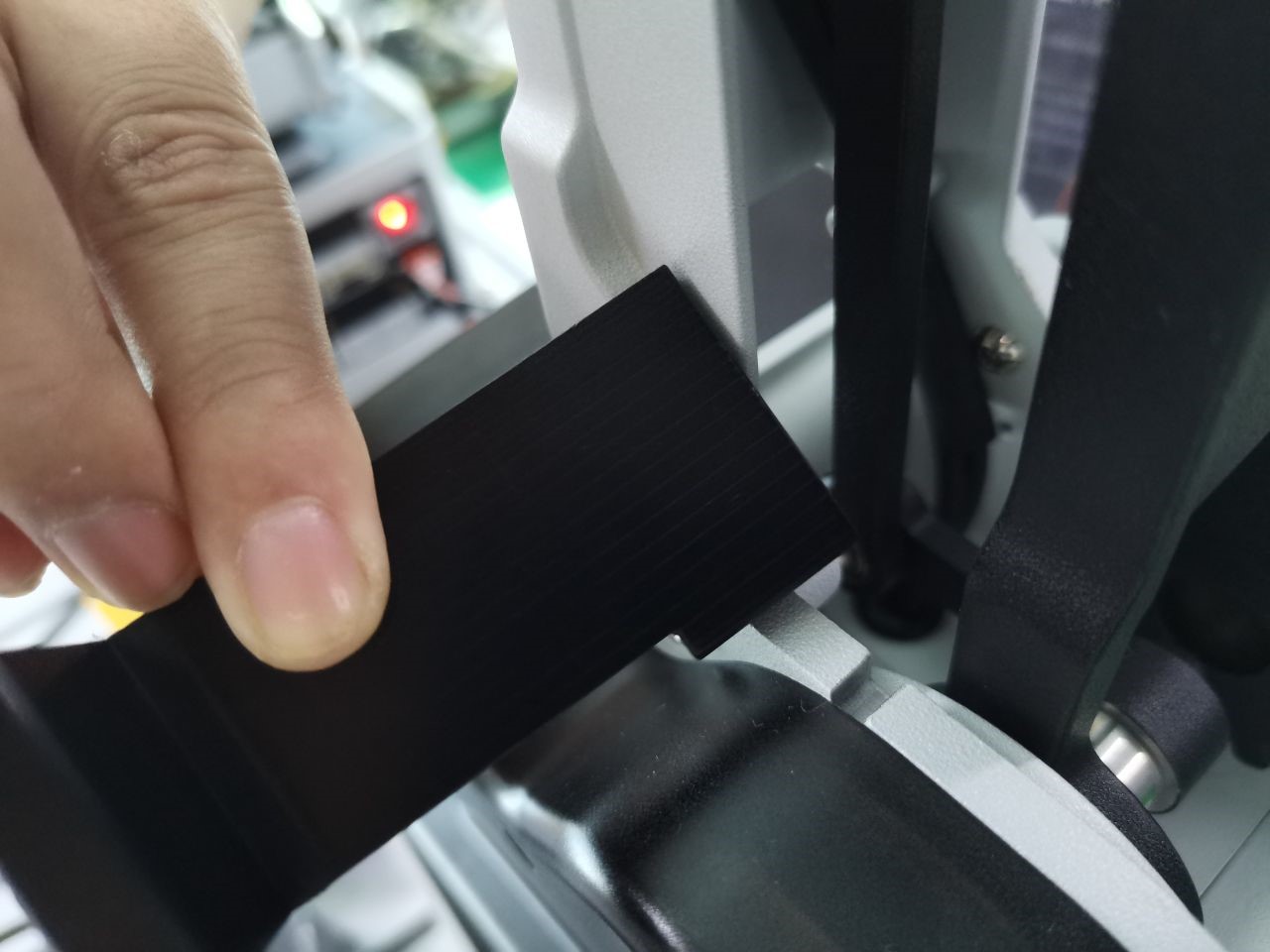
(3)2軸の原点を調整します。
アームの左側には、下図ような原点調整用の溝があります。この溝にキャリブレーションツールを差し込み、アームが垂直になるよう調整を行ってください。

(4)3軸の原点を調整します。
アームを90度の位置に持ち上げます。下図のようにキャリブレーションツールの直角部分を当てて調整を行ってください。

このとき、1軸、2軸が調整した位置からずれてしまうことがないようご注意ください。微調整はDobotStudio2020上のコントローラから行うのがおすすめです。
(5)DobotStudioPro上でSettings > Home Calibrationを選択してください。
パスワード入力を求められますので、「888888」と入力してください。
(6)”Home calibration”をクリックし、”Operated successfully”のメッセージが表示されればホームキャリブレーション完了です。

また、各軸ごとにキャリブレーションを行うことも可能です。

不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。