
目次
1. はじめに
MG400ではスタンドアローンでプログラムを実行できるRemoteI/Oという機能があります。
この機能利用時にOnlineモードで同じプログラムを実行していた際には見られなかった挙動が見られる場合があります。
本稿ではそれらの発生例と解決方法についてご案内いたします。
2. 環境
以下の環境にて、この手順が有効であることを確認しています。
OS: Windows 10(64bit)
使用ソフトウェア:DobotStudioPro v2.6.1(以前のバージョンでも本稿においては大きな違いはございません)
3. よくある例
Onlineモードで動作確認ができているプログラムをRemote I/Oモードで動作させたい際に起こりうるエラーは下記のようなものがございます。
3-1. 衝突検知の作動
Onlineモードでは発生しなかったアームの動作で衝突検知が発生してしまうことがあります。
こちらはMG400のファームウェアバージョンによって発生する不具合になります。
3-2. 動作時の不自然なエラー、バグ
衝突検知と同様にOnlineモードでの動作確認時には発生しなかったエラーが別途発生し、動作が止まってしまう場合があります。
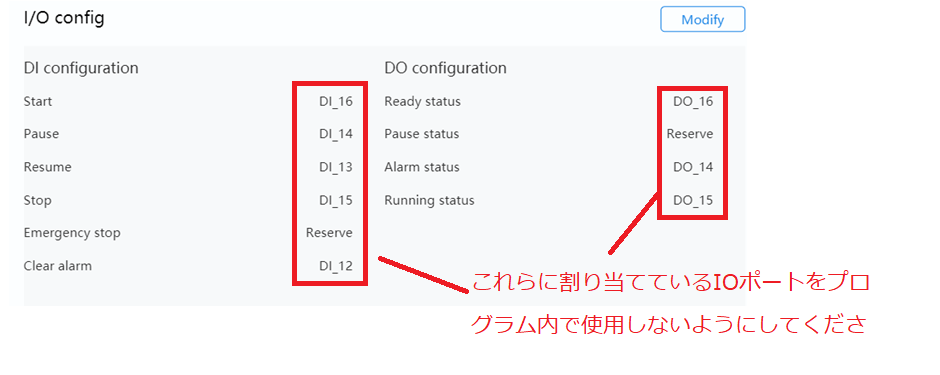
こちらはRemote I/O設定時に割り当てているIOポートとプログラムで使用しているIOポートの重複によって発生していることが考えられます。
3-3. アームの動作ポイントの位置ずれ
同じ座標に向かって動作しているはずがRemote I/O時にはOnlineでの動作時と実際の位置がずれてしまうことがあります。
こちらは①と同様、ファームウェアバージョン由来の不具合になります。
4. 対処法
4-1. プログラムで使用しているIOポートの確認
プログラム内で条件分岐やデータのやり取りのためなどに使用しているIOポートが
Remote I/Oの割り当てと重複していないかご確認をお願いいたします。
4-2. ファームウェアアップデート
ご使用のMG400の本体ファームウェアをご確認ください。
ファームウェアバージョンが1.5.5.0以下になりますとRemote I/Oモードでの動作時に不具合が生じうるバージョンになります。
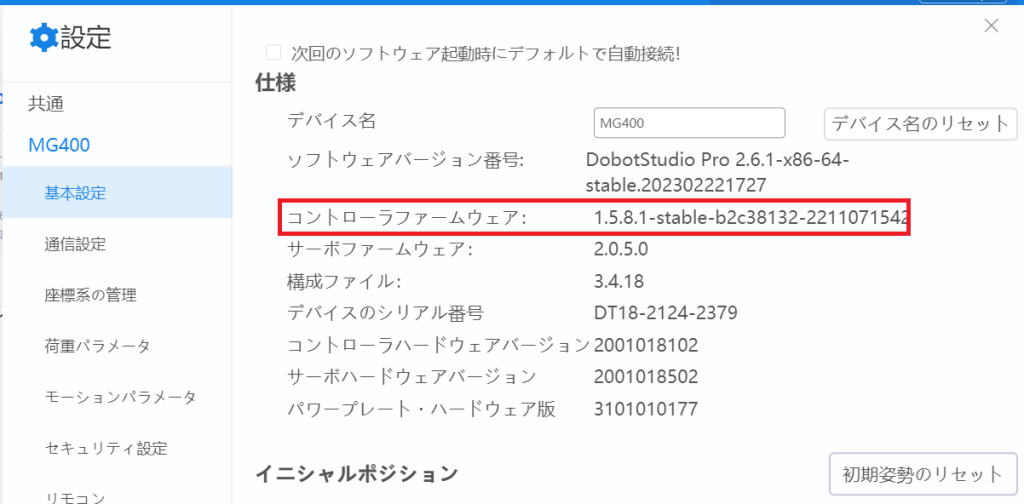
下記リンクの記事を参考にご使用のMG400のファームウェアバージョンを確認後、現行の最新バージョンへのアップデートを実施後、再度Remote I/Oモードでの動作をお試しください。
[MG400] アップデート方法 – TechShare FAQ
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。