
初めに
本記事では、B2の開発環境についてご案内します。
参考資料:
B2 SDK Development Guide – UnitreeRobotics
環境
環境は、次のようなものを想定しています。
- 機種: B2
1.概要
結論から述べると、B2の開発環境はGo2とほぼ同じになります。
例えば、弊社FAQで紹介している2次開発デモ(【Unitree Go2】Go2の2次開発デモを作ってみた)をそのままB2で行っても問題なく動作することが確認できました。

※外部コンピュータと有線LANでGo2/B2に接続し、動作確認
※動作確認時に使用した外部コンピュータ:Jetson Orin Nano (Foxy/Ubuntu20)
有線接続する際は、背面のポートの右側3つが使用可能です。
ねじを外してから、付属のボルトを取り付けて、引っ張ることで、防水キャップを取り外すことができます。


下記で正しく有線が接続できたかを確認できます:
$ ping 192.168.123.161
$ ping 192.168.123.162
$ ping 192.168.123.164
2.Go2と異なる部分について
2-1. 内部コンピューターへのアクセス方法
ssh unitree@192.168.123.164- ユーザー名:unitree
- パスワード:[購入時にご案内します]
- IPアドレス:192.168.123.164
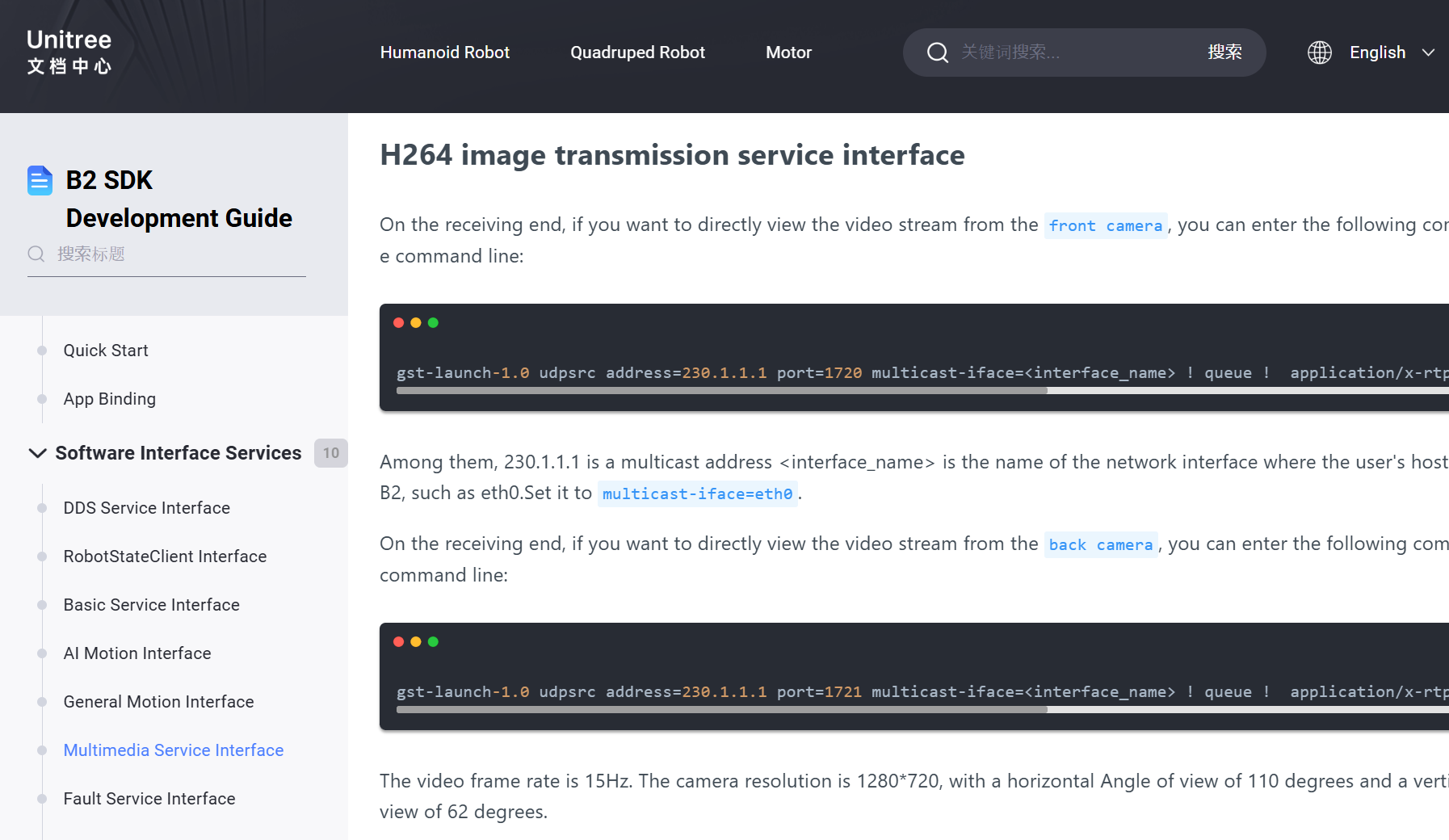
2-2. 背面のカメラストリームについて
Frontカメラの取得方法についてはGo2と同じです。
ただし、B2は背面にもカメラがあるため、その場合port番号を変更する必要があります。
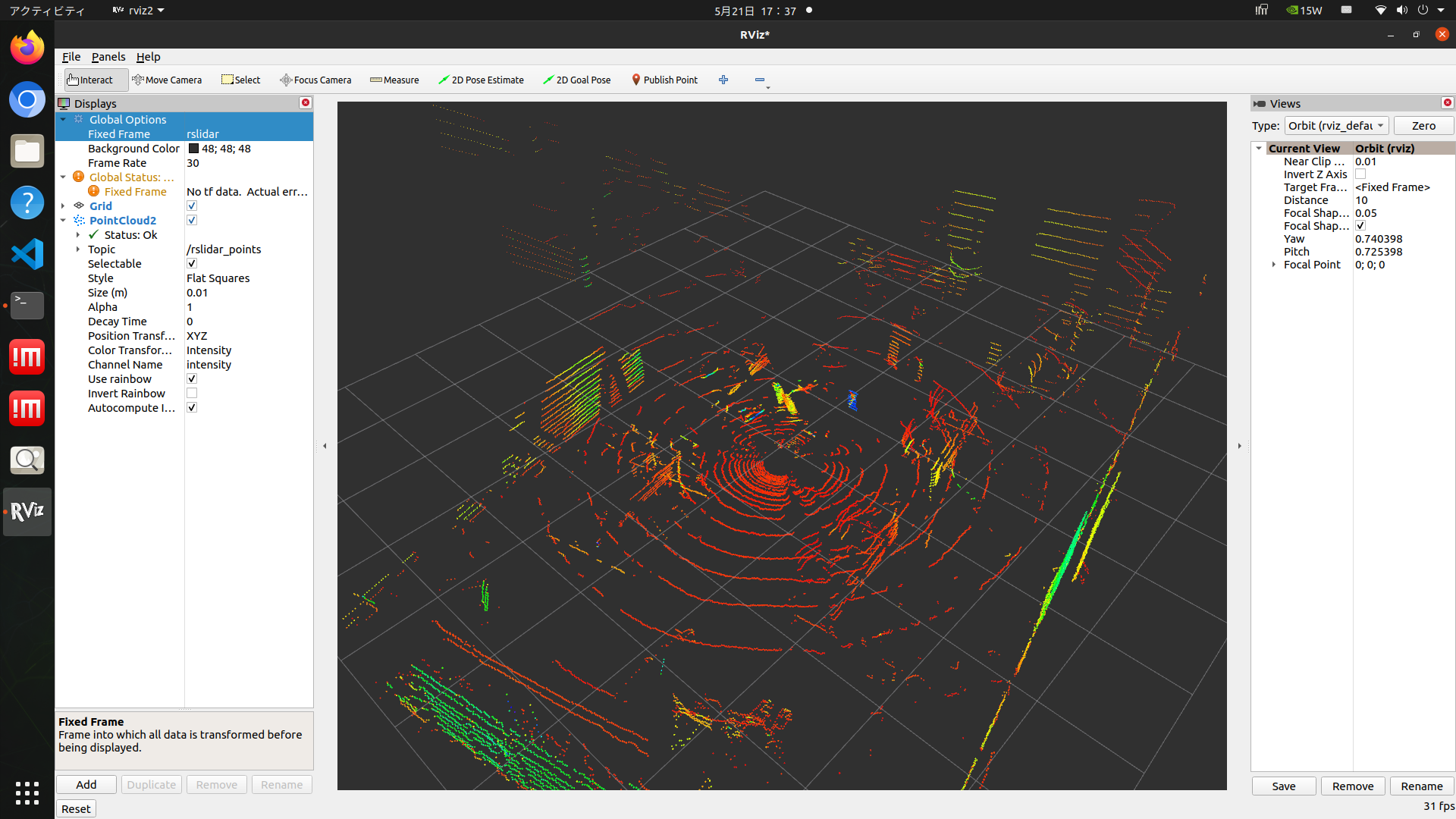
2-3. LiDAR点群情報について
LiDARも4D LiDAR L1とRobosense Helios 32との違いがあるので、点群を表すトピック名が異なります。
おわりに
B2の開発環境を見てきました。
この記事が少しでも役に立てたら幸いです。