

1. はじめに
Novaシリーズでは、可搬重量が異なるNova2,Nova5の計2種類のロボットアームが販売されています。
本稿ではそれぞれの開封および設置手順をご案内します。
[注意] 設置台は、Novaの重量だけでなく、最大加速度運動の動力に耐える剛性が必要です。
[注意] Novaの移動軌跡が動作中に妨げられないような位置に設置してください。
2. ロボットアームの開封
Novaをご購入いただくと、段ボールに梱包された形でお客様のもとに届けられます。
下の動画で梱包物の紹介や実際に開封する様子を紹介しています。
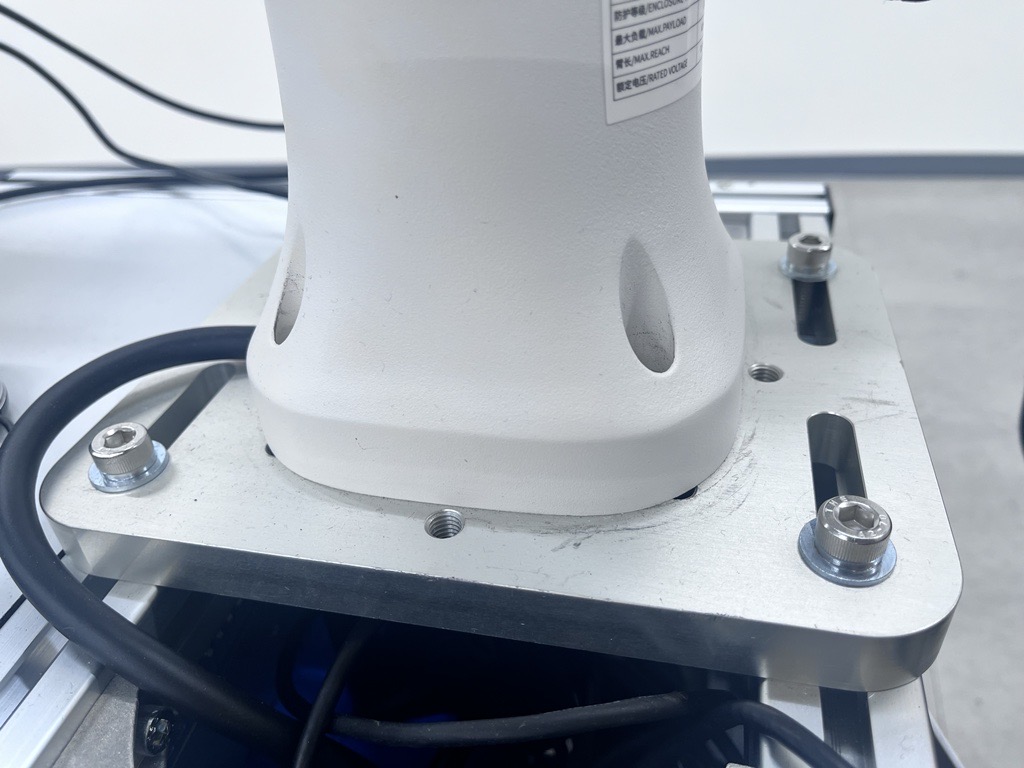
3. ロボットアームの設置手順
3-1. Nova2
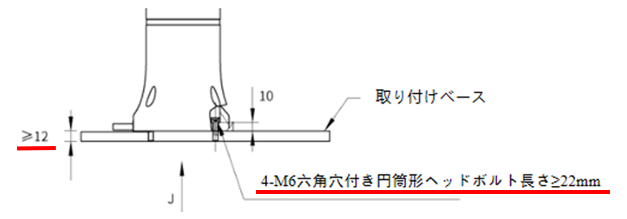
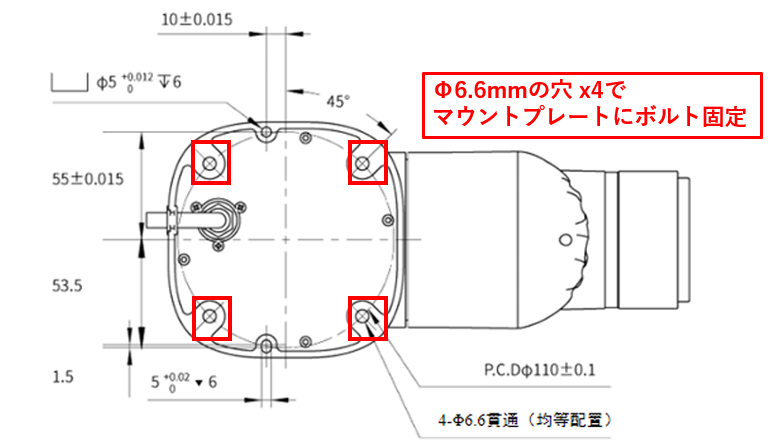
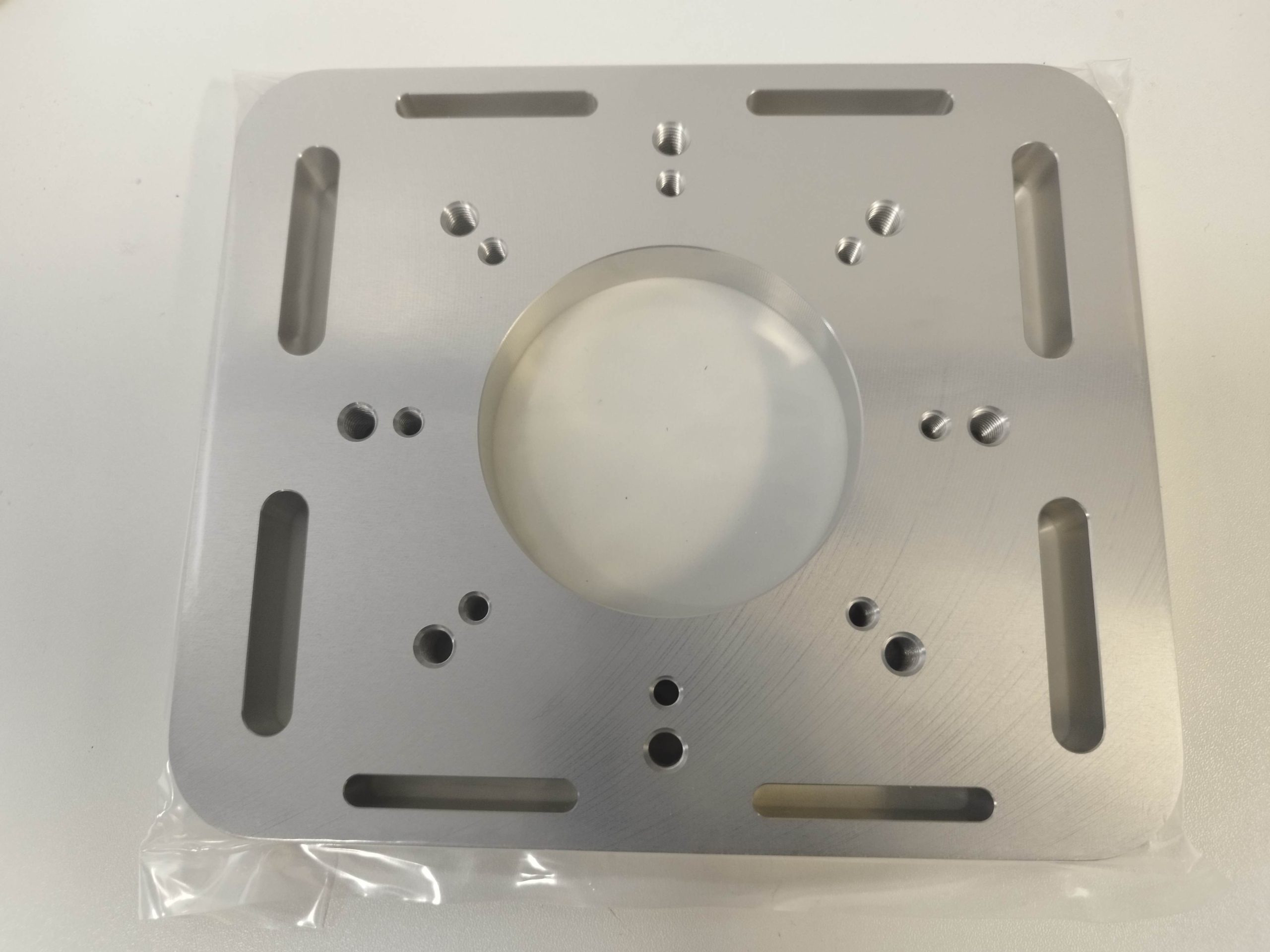
下の画像がNova2のスタンドの図面となります。
Nova2の場合は、マウントプレート(厚さ12mm以上)にM6の六角穴付きボルト(長さ22mm以上)で固定します。
3-2. Nova5
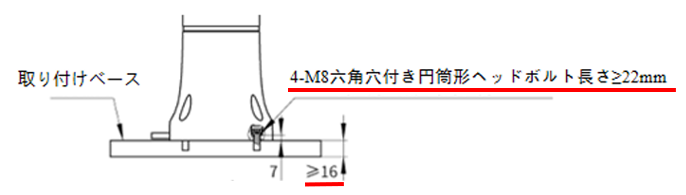
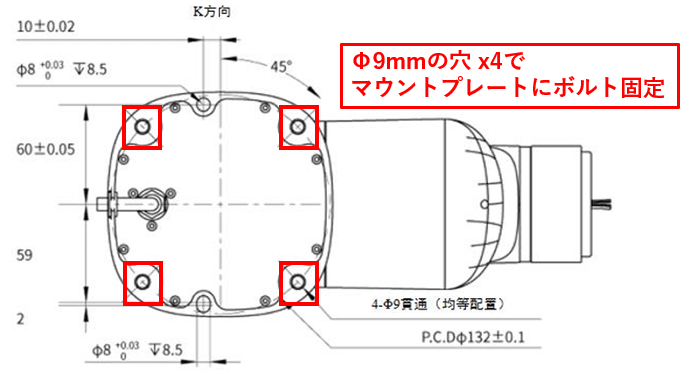
Nova5のスタンドの図面は以下の通りです。
Nova5の場合は、マウントプレート(厚さ16mm以上)にM8の六角穴付きボルト(長さ22mm以上)で固定します。
3-3. マウントプレートに関して
マウントプレートは弊社でも販売しておりますので、ご興味のある方は下記メールアドレスまでお問い合わせください。
4. ケーブル接続手順
次の画像に従って、必要なケーブルを接続します。
① Nova本体から出ている通信用ケーブルを接続します。
② 電源ケーブルを接続します。左から順に赤、黒、黄色の端子を接続してください。
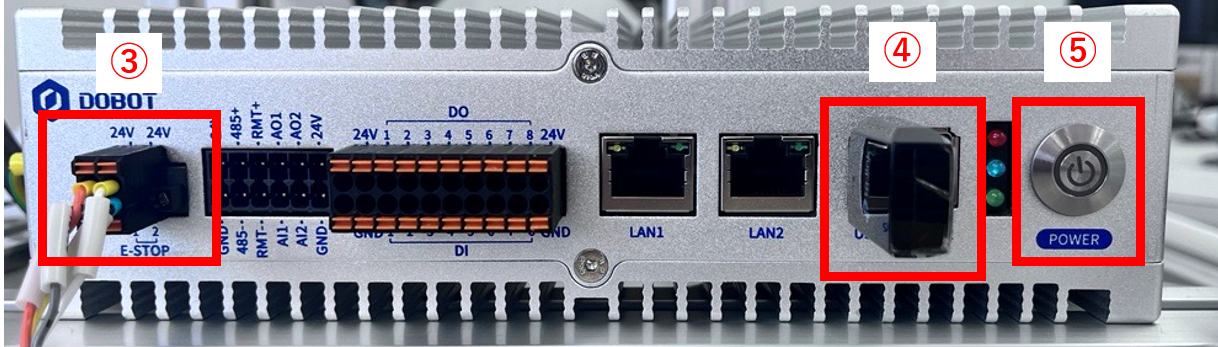
③ 非常停止スイッチを接続します。
④ USBドングルをのUSB1に接続します。
⑤ 電源スイッチを押し、電源を入れます。Nova,CCBoxのランプが青点滅から青点灯に変わると起動完了です。
[備考] NovaおよびCCboxの青点滅が終わらない場合、起動に失敗している可能性がございます。5分以上点滅が続く場合は、電源を入れなおしてください。またCCboxの電源を入れてもNova側のライトが点滅および点灯しない場合、非常停止ボタンが押されている可能性があります。非常停止ボタンを右方向に回転させることで、押下状態を解除することができます。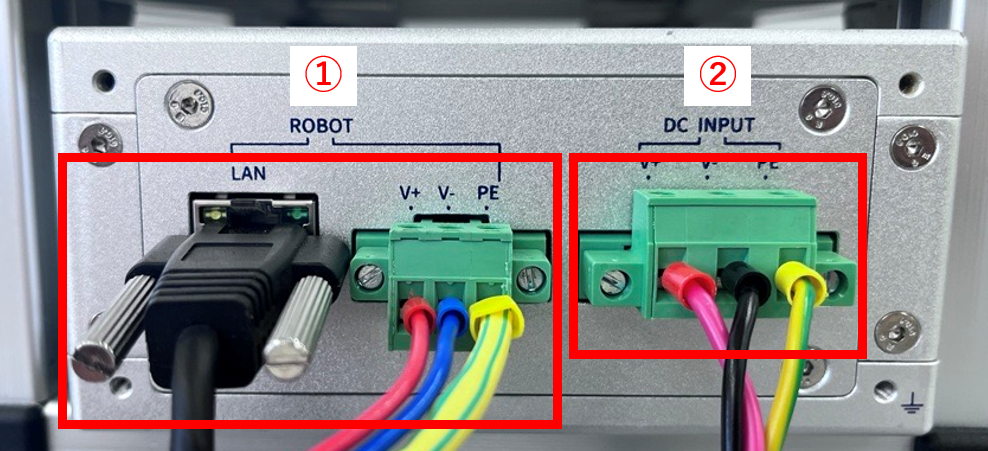
下記動画でも接続手順を紹介していますので、ご参照いただければ幸いです。
動画の最後にある専用ソフトウェア「DobotStudio Pro」との接続に関しては、別記事にて詳しくまとめています。
ここまでの操作が終われば、次はNovaを制御するための専用ソフトウェア「DobotStudio Pro」との接続を行います。
下記の記事に詳細をまとめていますので、よろしければこちらもご参照ください。
何かご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。