

はじめに
本稿では、DOBOT社がオプション製品として販売しているソフトグリッパーキットの導入方法をご案内します。
キット内容物
キットの内容物は以下の通りです。
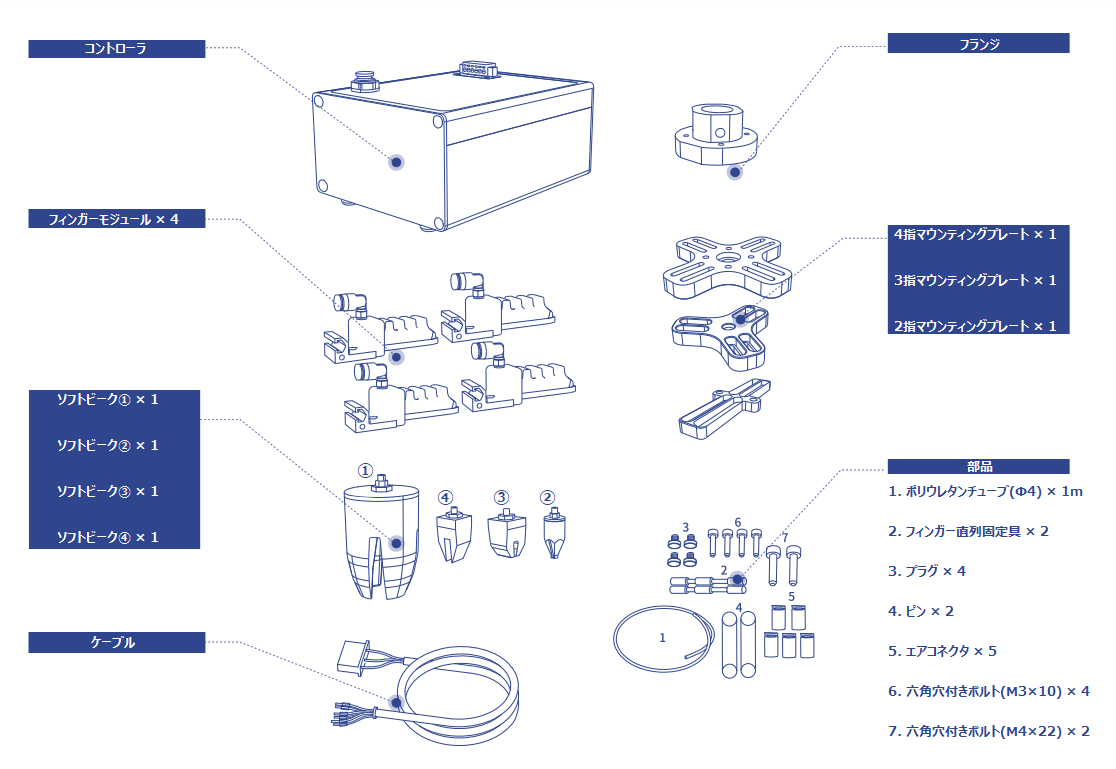
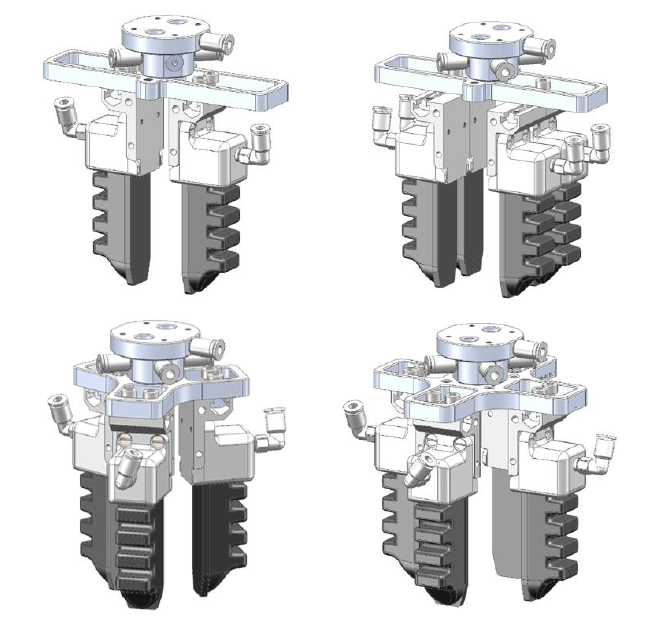
フィンガーモジュールは、以下に示すようにマウンティングプレートと組み合わせて、2本指グリッパー、3本指グリッパー、4本指グリッパーに組み立てることができます。
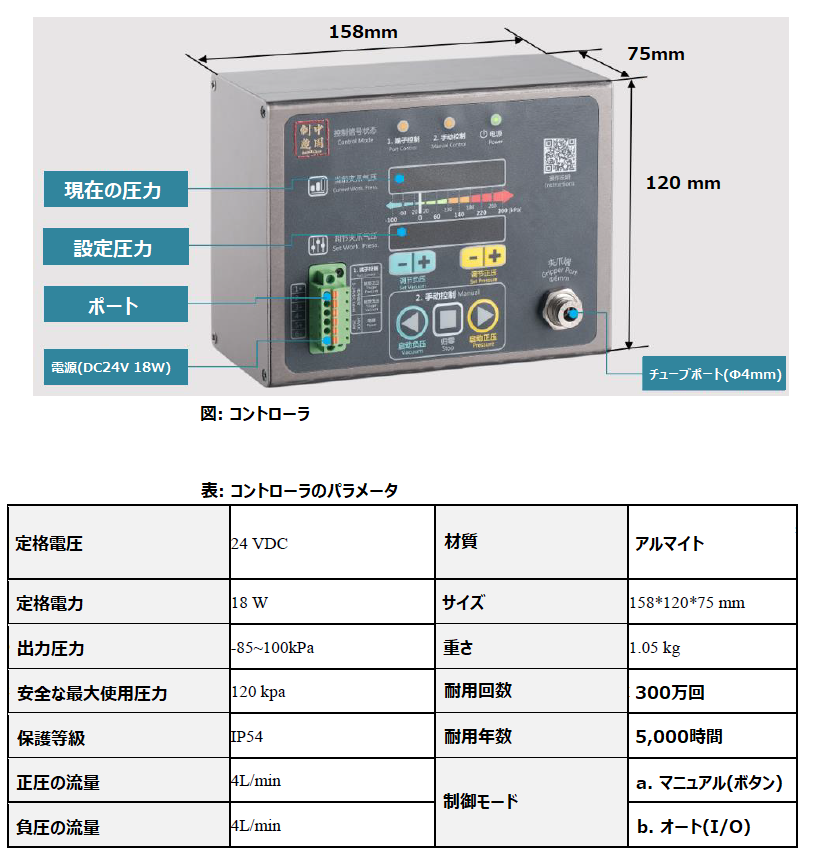
また、ソフトグリッパーキットには専用コントローラも含まれており、フィンガーモジュールとソフトビークに対して、オープン・リラックス・グリップの3種の制御を行うことができます。
・出力圧力範囲は-85~100kPaです。
・デジタル表示と操作ボタンを一体化したパネルがあり、ボタンから様々な調整が可能です。
・正圧で動作します。負圧はパネルにあるボタンでリアルタイムに調整できます。
・マニュアル(ボタン)、オート(I/O)の2つの制御モードがあります。
・保護等級IP54の防水・防塵性能を有します。
導入方法
フィンガーモジュールの取り付けの場合
2指マウンティングプレート、3指マウンティングプレート、4指マウンティングプレートへのフィンガーモジュールの取り付け方は、同様です。ここでは、4指マウンティングプレートを例に説明します。
step1
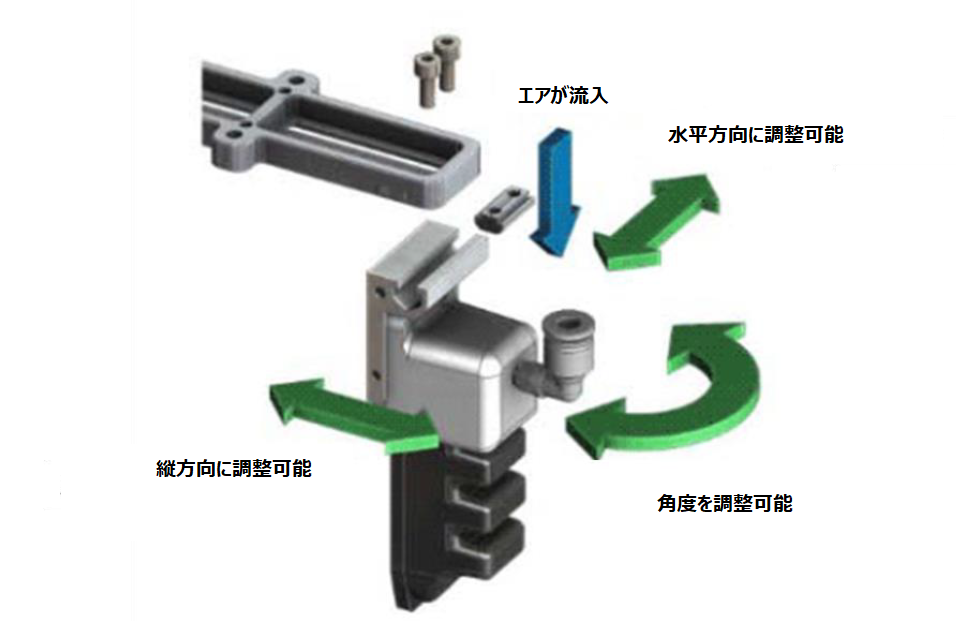
フィンガーモジュールを4指マウンティングプレートに取り付け六角穴付ボルトで締めます。使用する状況に応じて、取り付け位置を調節してください。

step2
プラグを4指マウンティングプレートに取り付け、締めます。
step3
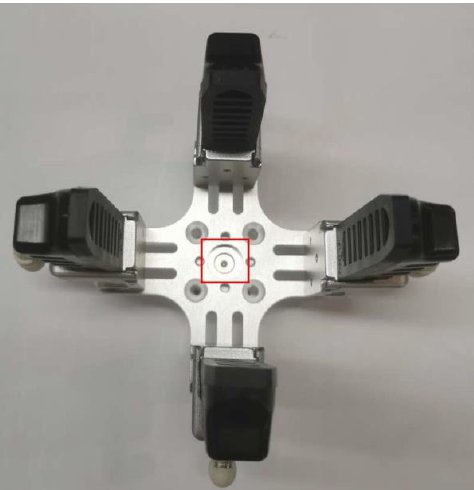
エアコネクタをフランジに取り付けます。

step4
フランジを4指マウンティングプレートに取り付け六角穴付ボルトで締めます。
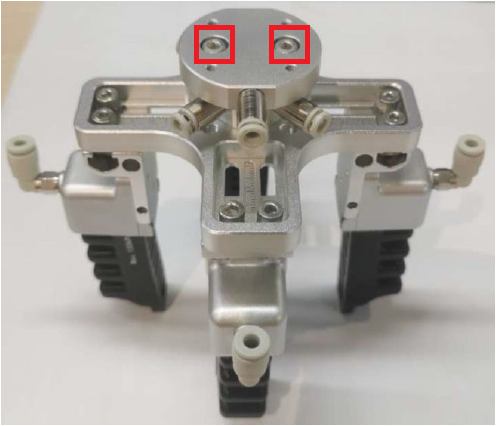
step5
MG400のフランジ(MG400付属品)を、MG400付属品のボルト × 4を用いてフランジに取り付けます。また、ポリウレタンチューブ(Φ4)を取り付けます。
[備考] ポリウレタンチューブ(Φ4)は、実際の用途に合わせて切ってお使いください。

step6
ソフトグリッパーを、MG400のフランジを介してMG400に取り付けます。その後、MG400のフランジ側面のボルトを締めます。また、ポリウレタンチューブ(Φ4)を前腕部に取り付けます。
[注意]モーターに負荷がかかるのを防ぐため、この操作はアームの給電を切った状態で行ってください。

step7
ケーブルをコントローラに接続します。

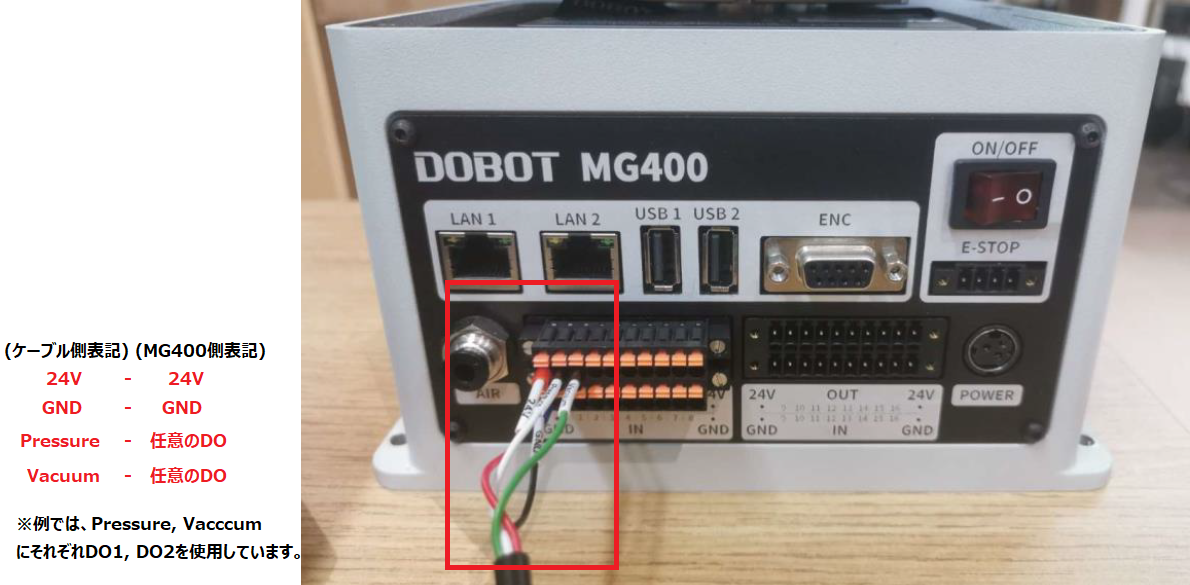
step8
ケーブルを、以下のようにMG400背面のI/Oに接続してください。今回の例ではDO_01で排気、DO_02で吸気を行うように接続しています。
step9
コントローラのグリッパーポートと、MG400背面のエアコネクタをポリウレタンチューブ(Φ4)で接続します。

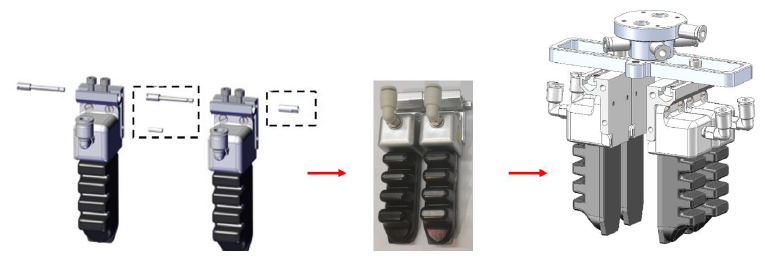
step10
また、2指マウンティングプレートの片側に2本のフィンガーモジュール(計4本)を用いる場合は、以下のようにフィンガー直列固定具をご使用ください。
step11
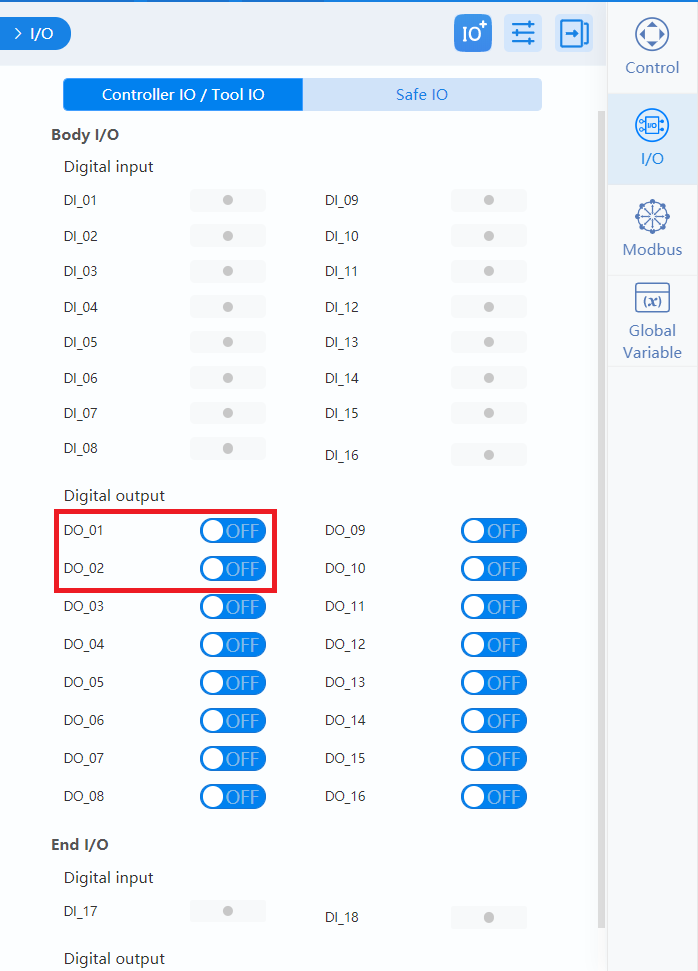
DobotStudio proまたはDobotSCStudioにて、ソフトグリッパーが制御できるか確認してみましょう。正しく導入できた場合、I/OページのDO_01をONにしたときに排気、DO_02をONにしたときに吸気を行います。

ソフトビークの取り付けの場合
ソフトビーク①、ソフトビーク②、ソフトビーク③、ソフトビーク④の取り付け方は同様です。ここでは、ソフトビーク③を例に説明します。
step1
4つのプラグをフランジに取り付けます。また、エアコネクタを以下の画像の位置に取り付けます。

step2
MG400のフランジ(MG400付属品)を、MG400付属品のボルト × 4を用いてフランジに取り付けます。

step3
ソフトビーク③をフランジに取り付けます。
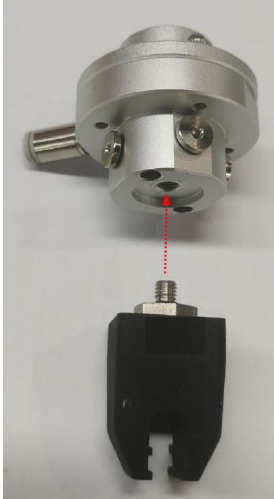
step4
ソフトビークを、MG400のフランジを介してMG400に取り付けます。その後、MG400のフランジ側面のボルトを締めます。
[注意]モーターに負荷がかかるのを防ぐため、この操作はアームの給電を切った状態で行ってください。

step5
ケーブルをコントローラに接続します。

step6
ケーブルを、以下のようにMG400背面のI/Oに接続してください。今回の例ではDO_01で排気、DO_02で吸気を行うように接続しています。
step7
コントローラのグリッパーポートと、MG400背面のエアコネクタをポリウレタンチューブ(Φ4)で接続します。
step8
DobotStudio proまたはDobotSCStudioにて、ソフトグリッパーが制御できるか確認してみましょう。正しく導入できた場合、I/OページのDO_01をONにしたときに排気、DO_02をONにしたときに吸気を行います。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。