

1. はじめに
本稿では、DOBOT社がオプション製品として販売している小型電動グリッパーキットの導入方法をご案内します。
2. キット内容物
キットの内容物は以下の通りです。

3. 導入方法
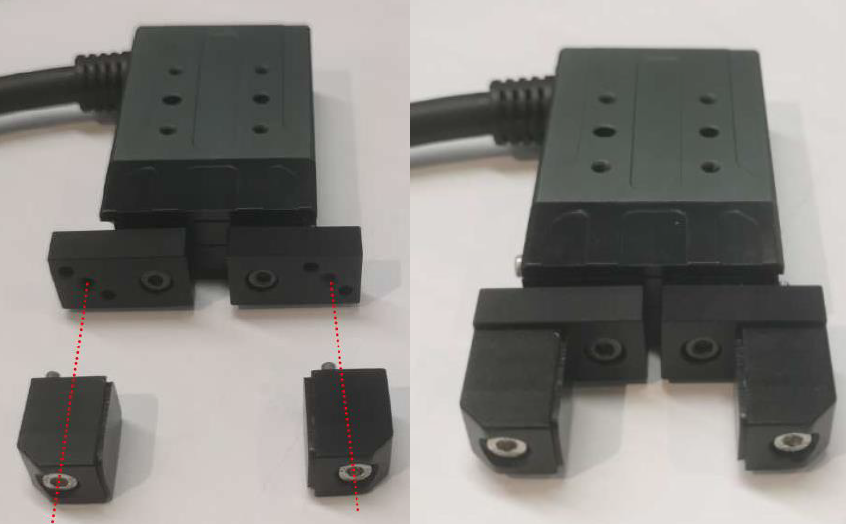
3-1. グリッパー先端パーツの取り付け
step1
小型電動グリッパーの先端パーツを取り外します。

step2
グリッパー用アダプターを、六角穴付きボルト (M3×4) × 2本を用いて小型電動グリッパーに取り付けます。

step3
step1にて取り外した先端パーツを、グリッパー用アダプターに取り付けます。
step4
グリッパー用マウンティングプレートを、六角穴付きボルト (M3×4) × 2本を用いて小型電動グリッパーに取り付けます。

step5
MG400のフランジ(MG400付属品)を、MG400付属品のボルト × 4を用いてグリッパー用マウンティングプレートに取り付けます。

3-2. パラメータの設定
step1
小型電動グリッパーのケーブルのコネクタ(緑・白)を、それぞれグリッパー用コントローラーのポート(ENCODER・UVW)に接続してください。

step2
グリッパーケーブルのコネクタを、グリッパー用コントローラーのポート(INPUT)に接続してください。

step3
グリッパーケーブルを、以下画像のように、USB – RS485 変換ケーブルに接続してください。

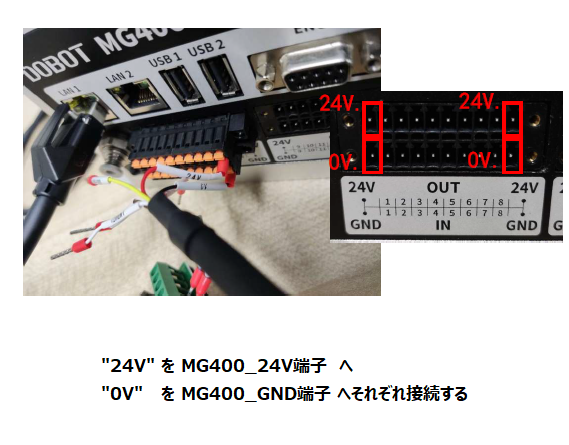
step4
グリッパーケーブルを、以下画像のように、MG400背面のI/Oに接続してください。
step5
USB – RS485 変換ケーブルのUSB端子をWindows PCに接続してください。その後、MG400の電源を入れて下さい。
[注意]USB端子の抜き差しは必ず、MG400の電源を切った状態で行って下さい。

step6
パラメータ設定用ソフトウェアのインストーラを以下からダウンロードして、インストールしてください。
DHGripperUI-V3.3.1.26-20260415-Setup.zip
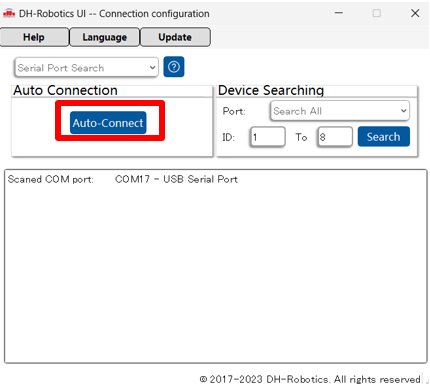
step7
接続に成功すると、設定用ページが表示されます。Auto-Connectをクリックして接続を行って下さい。
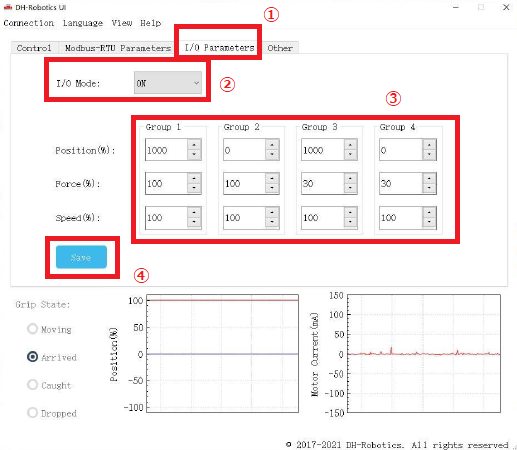
step8
① I/Oパラメータタブを開きます。
② I/O Mode: I/Oで設定したパラメータを呼び出すか否かを変更できます。(MG400からのI/Oで制御する場合は、ONにしてください)
③ Group1 ~ 4にそれぞれPosition(開閉幅)、Force(クランプ力)、Speed(開閉速度)を設定できます。
④ 設定を保存できます。
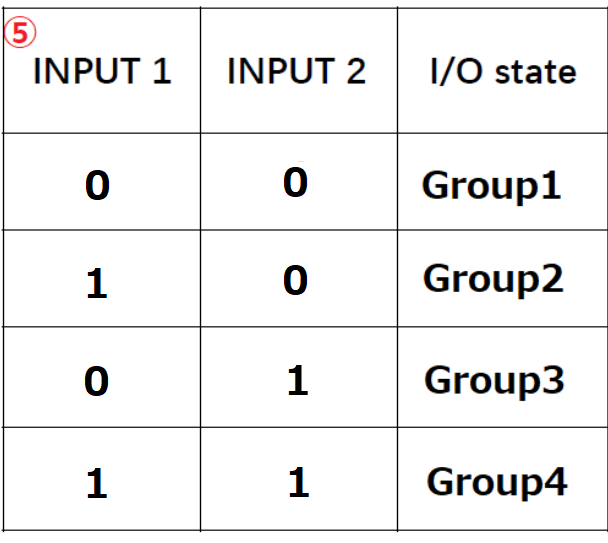
⑤ GroupとInputの関係は表の通りです。
step9
パラメータ設定用ソフトウェアを閉じ、MG400の電源を落としてから、配線を外してください。
3-3. MG400との接続
構成は次の図の通りです。以下の手順に従って接続を行ってください。

step1
小型電動グリッパーを、MG400のフランジを介してMG400に取り付けます。その後、MG400のフランジ側面のボルトを締めます。
[注意]モーターに負荷がかかるのを防ぐため、この操作はアームの給電を切った状態で行ってください。

step2
小型電動グリッパーのケーブルのコネクタ(緑・白)を、それぞれグリッパー用コントローラーのポート(ENCODER・UVW)に接続してください。
step3
グリッパーケーブルのコネクタを、グリッパー用コントローラーのポート(INPUT)に接続してください。
step4
グリッパーケーブルを、以下画像のように、MG400背面のI/Oに接続してください。

step5
DobotStudio Proにて、小型電動グリッパーが制御できるか確認してみましょう。正しく導入できた場合、I/OページのDO_01, DO_2の4通りの出力[(0,0), (1,0), (0,1), (1,1)] において、あらかじめ設定しておいたパラメータによる4通りの制御が行われます。

step6
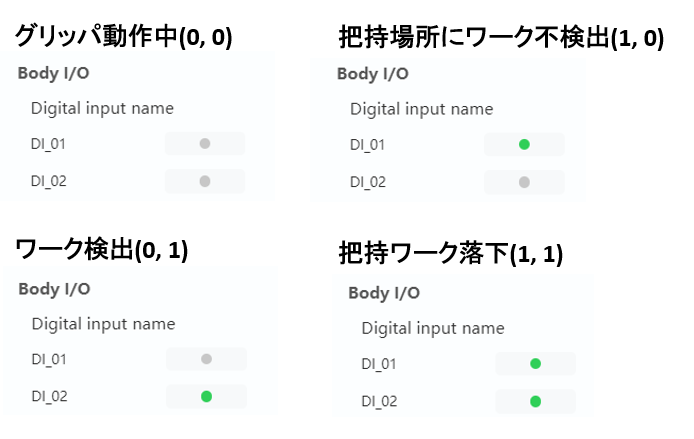
また、小型電動グリッパーからのI/Oのフィードバックにより、小型電動グリッパーの状態を確認することができます。I/OページのDI_01, DI_02の4通りの入力[(0,0), (1,0), (0,1), (1,1)] において、確認することができます。
3-4.コントロールボックスのLEDインジゲーター
コントロールボックスには現在のグリッパの状態を示すLEDインジゲーター表示がございます。以下は各状態におけるライトの点灯状況の対応表です。
例えばMG400からコントローラに信号を入力しているにも関わらずグリッパが動作しないとき、こちらのインジゲーターを確認してください。赤点滅のままのであればリモートIOモードに設定できていなかったり、不具合により初期化処理が終了していないなどの判断が可能です。
| 赤点滅 | 初期化前状態(動作不可) |
|---|---|
| 青点灯 | 待機状態(動作可能) |
| 紫点滅 | 命令受信 |
| 緑点灯 | 把持成功、ワーク検出 |
| 緑点滅 | 把持失敗、把持ワーク落下 |
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。