
1. はじめに
本稿ではMG400用スライダーレールキットの使用方法について紹介します。
スライダーレールキットを使用することでMG400のリーチを延長することができ、対応範囲を広げることが可能です。
他ロボットと接続して使うことはできません。ご注意ください。
2. 環境
本稿投稿時に使用している環境は以下になります。
OS: Windows 11(64bit)
MG400: DobotStudioPro v2.7.1, ファームウェア v1.5.9.0
また、MG400のセットアップは済ませてあるものとします。
お済でない方は以下リンクからMG400本体のセットアップをお願いいたします。
[MG400, M1Pro] セットアップ方法 – TechShare FAQ
3. 手順
step1
スライダーレールキット本体をねじ等で固定
step2
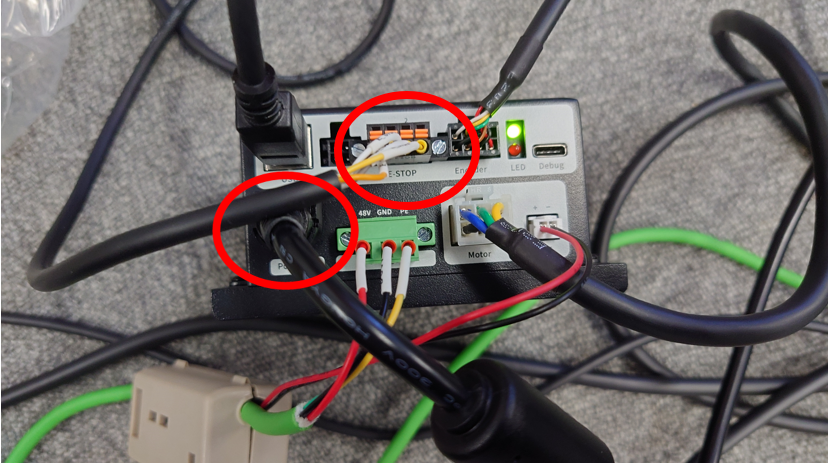
下記、二種類の図を参考にスライダーレールキットのコントローラを配線
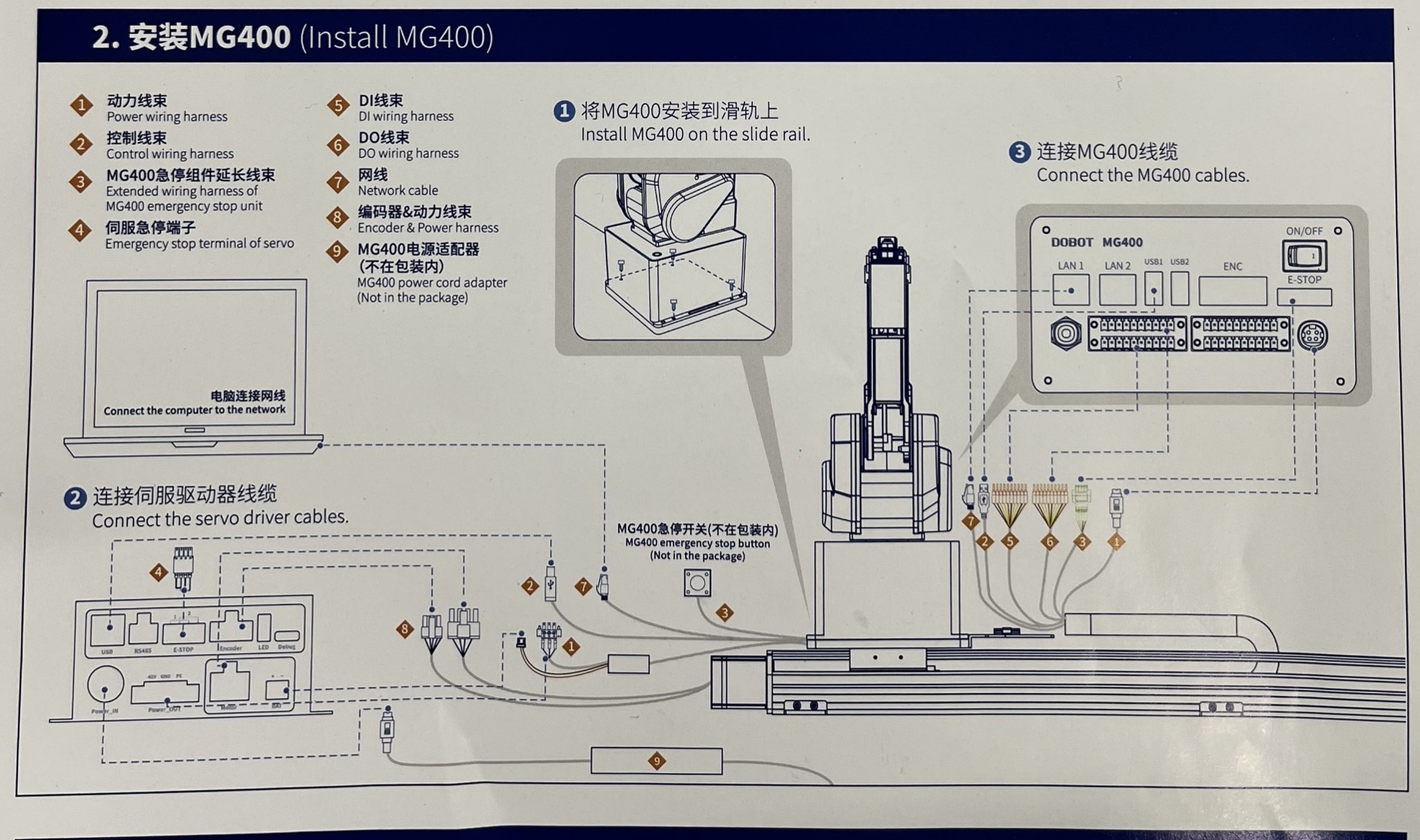
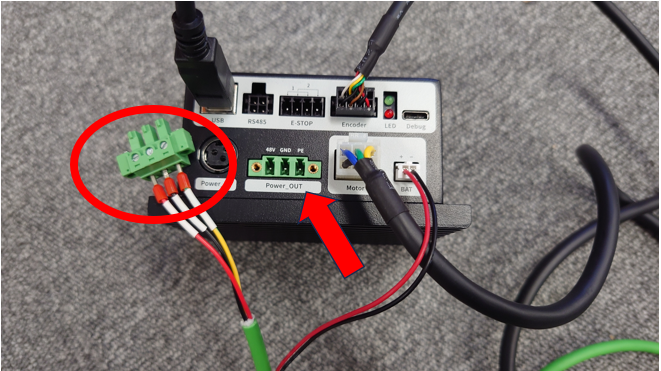
赤丸部部分はスライダーレールキット開封時には緑色の端子がついていないため同封されているものをご使用ください。
その後、矢印部分に配線してください。
step3
MG400の電源アダプター、非常停止ボタンをコントローラに配線
step4
スライダーレールキットにMG400をねじ止め(MG400に同封されているねじを使用)し、配線
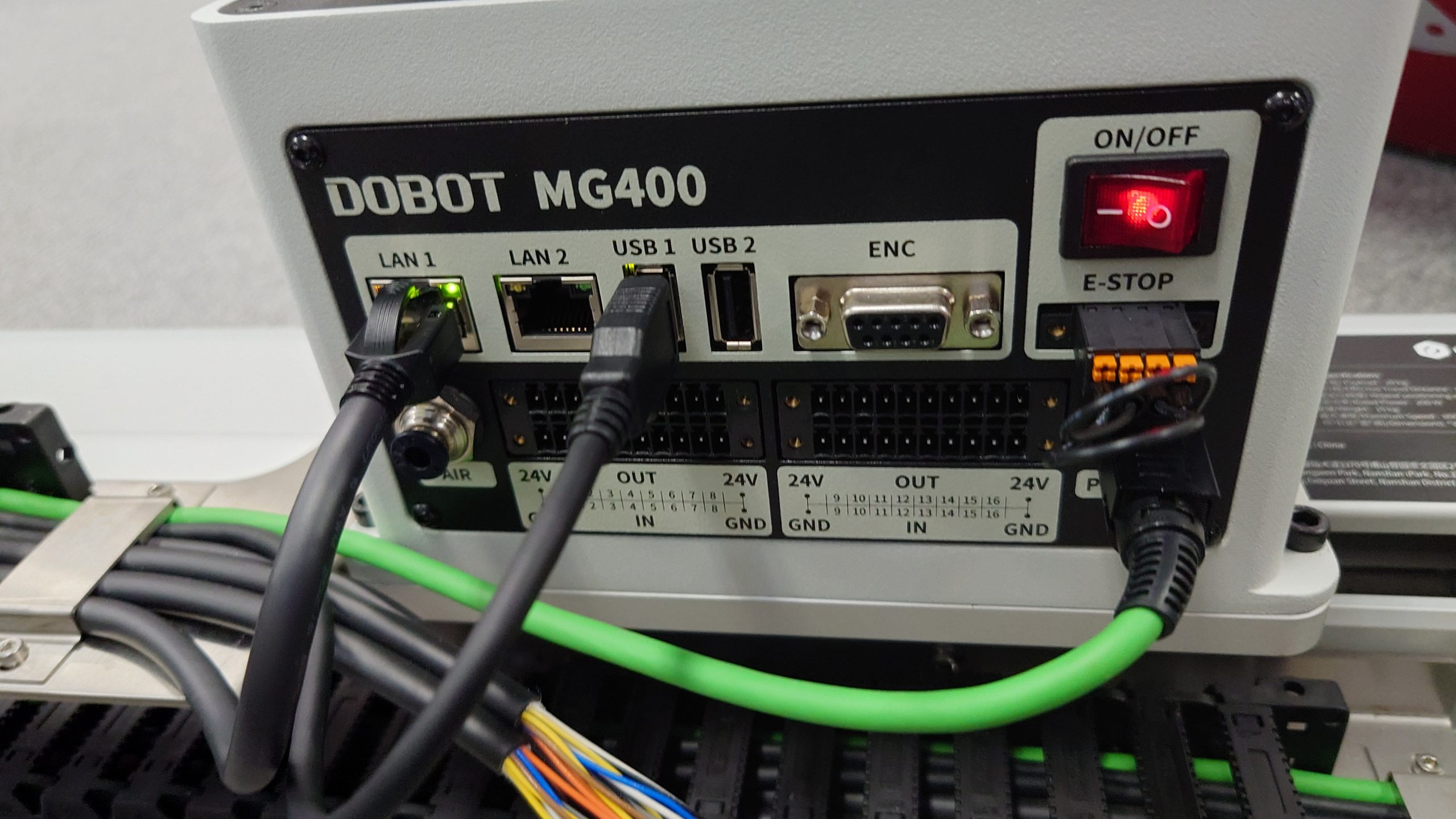
LANケーブル、USBケーブル、電源ケーブルはスライダーレールキットのものを、非常停止ボタンの部分にはスライダーレールキットに同封されているショート回路をご使用ください。
step5
電源アダプターを電源に接続した状態で、MG400の電源スイッチをONにし起動
step6
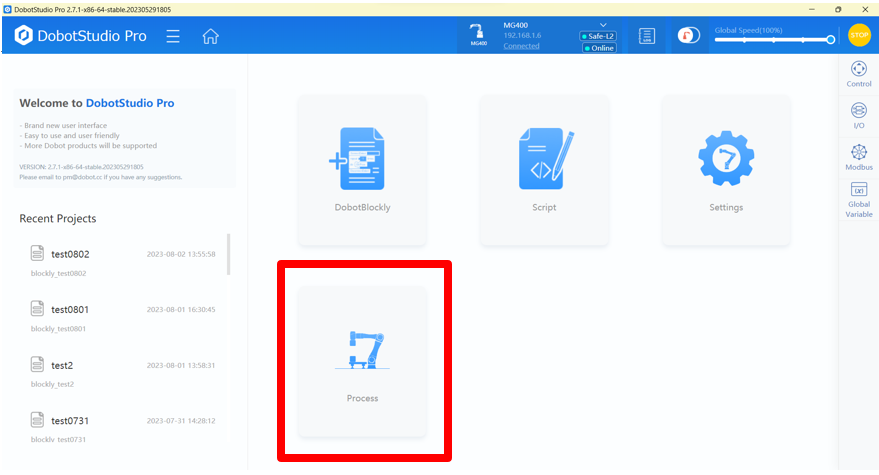
DobotStudio Proを起動し、Process画面に移行
step7
下図のスイッチをONにしてスライダーレールキットをイネーブルし、”Add AuxJoint teach point”のチェックボックスにチェックを入れる
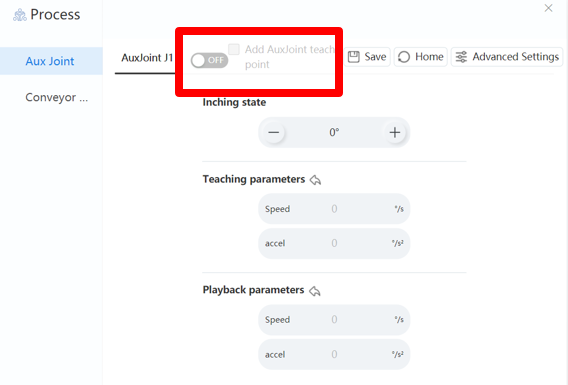
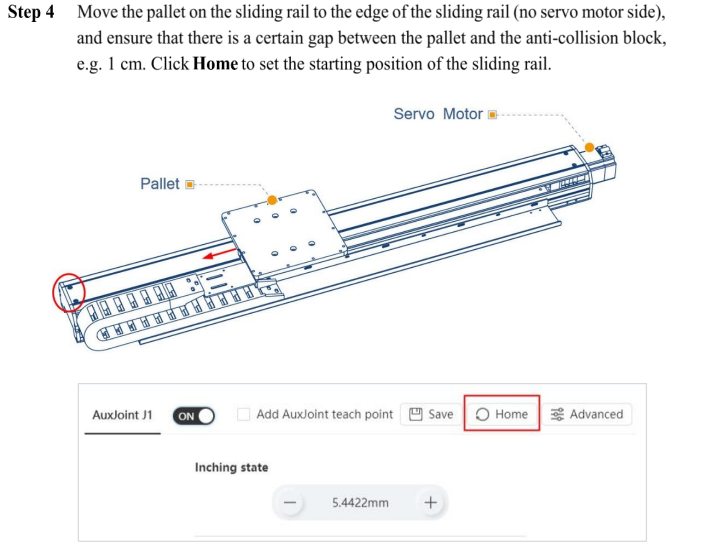
この段階でMG400をイネーブルするとこの画面からスライダーレールキットを手動操作できます。”Inching State”のプラスマイナスで操作してください。可動範囲は0~800mmです。この際、下図のようにMG400をサーボモーターのない側の端に寄せてください。その後、Homeボタンを押して0mmの地点を確定させてください。
スライダーレールキットの動作速度の変更も可能です。”Teaching Parameters”が手動操作時の速度、加速度で、”Playback Parameteres”がプログラム実行時の速度、加速度です。
基本的に、この画面から移行するとスライダーレールキットのコントロールができないため、必要であればこの画面で必要な数値を調整してください。
step8
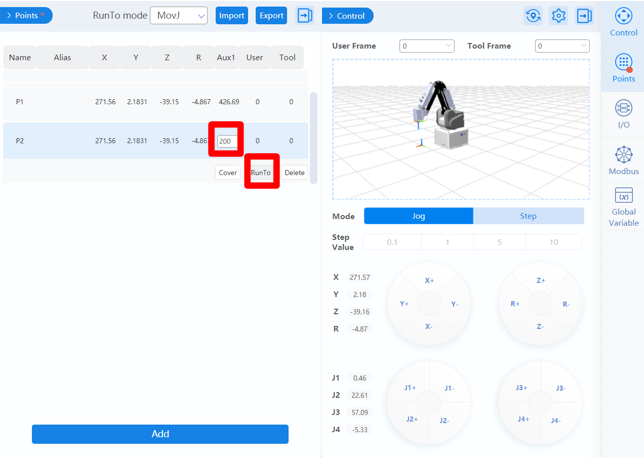
プログラム作成画面へ遷移(Blockly,Scriptどちらでも可)。pointタブをクリックしAUX1の項目が追加されていることを確認
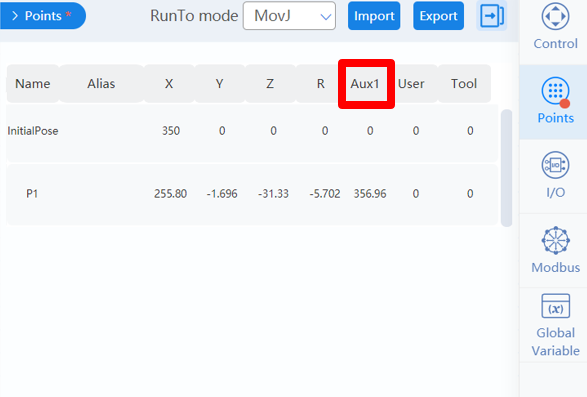
基本的にはMG400と同様にティーチングできます。
座標値を変更しRun toを実行すればスライダーレールキットを操作することが可能です。
4.プログラム作成時の注意事項
MG400とスライダーレールキットの動作がうまく同期しないことがございます。その際はMG400とスライダーレールキット、それぞれを個別で動作させるコマンドを作成し、間に動作を数秒停止させるコマンド(Blocklyでは)を追加することを推奨いたします。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。