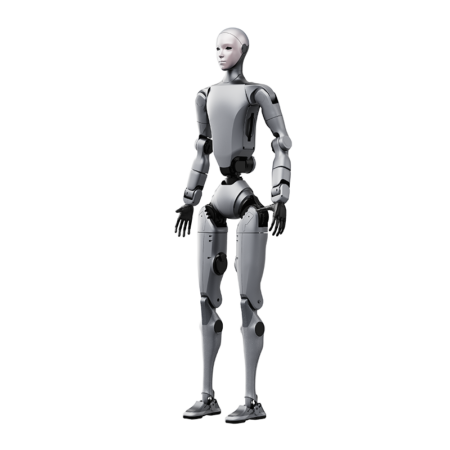
Unitree G1-D

Unitree G1-Dは、ヒューマノイド型ロボットのための「エンドツーエンド・プラットフォーム」です。アクチュエーター、ギアボックス、エンコーダー、センサーなど多数の独自開発パーツを内蔵し、高性能なヒューマノイドロボット実現を支えます。さらに、データ取得→処理→アノテーション→モデル学習→推論という一連の流れを統合したプラットフォームを備え、あらゆる開発フェーズをスムーズに進められる設計です。
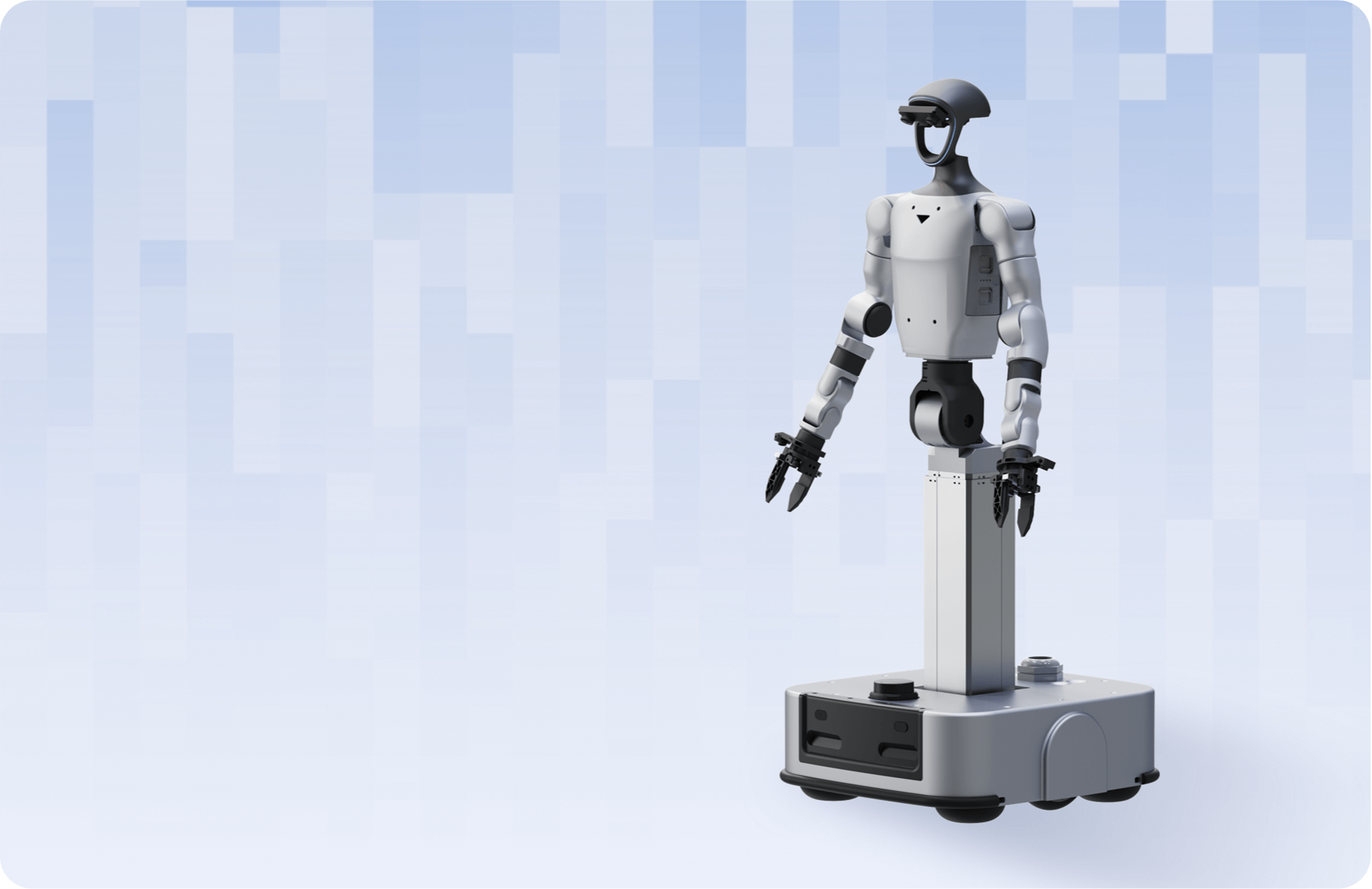
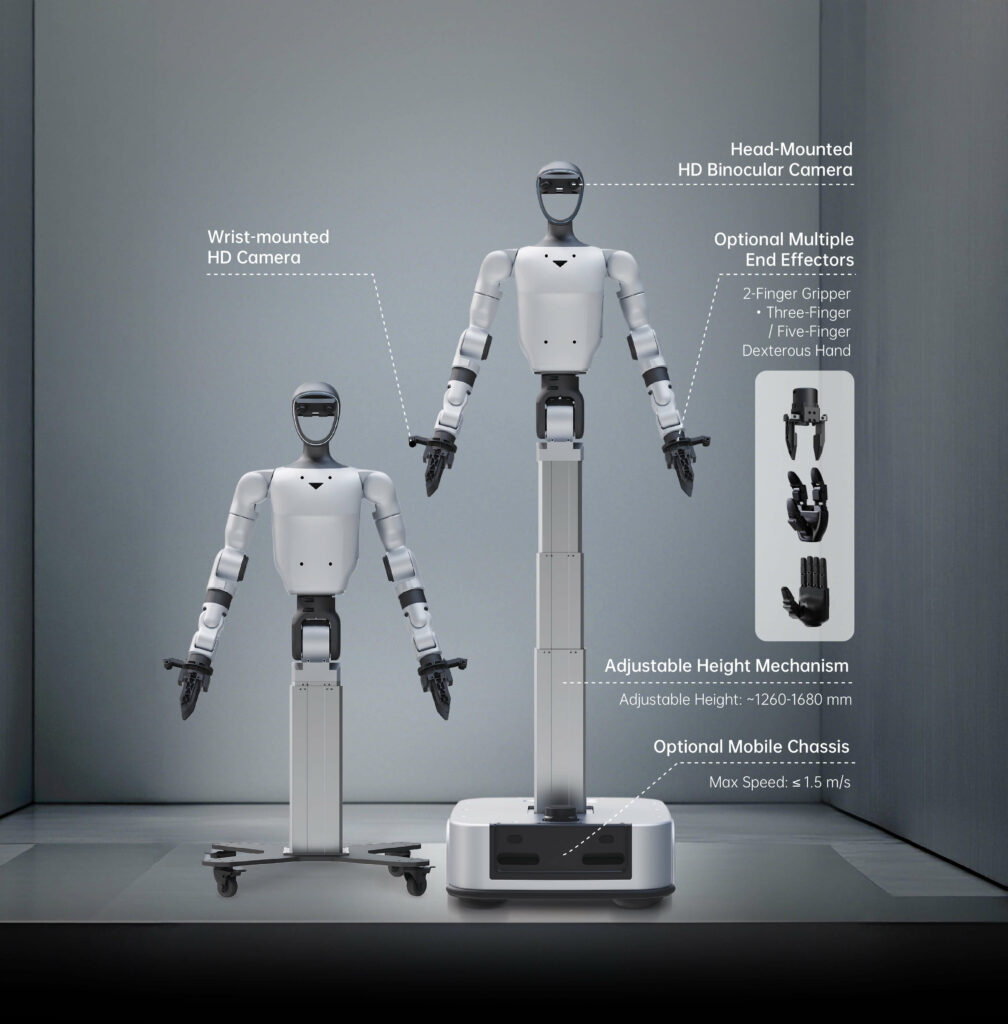
高自由度ロボットプラットフォーム
・腕部:7 DOF ×2
・腰:2 DOF
・垂直柱:1 DOF
・ベース:2 DOF。
・拡張された稼働ワークスペース、低遅延制御応答。
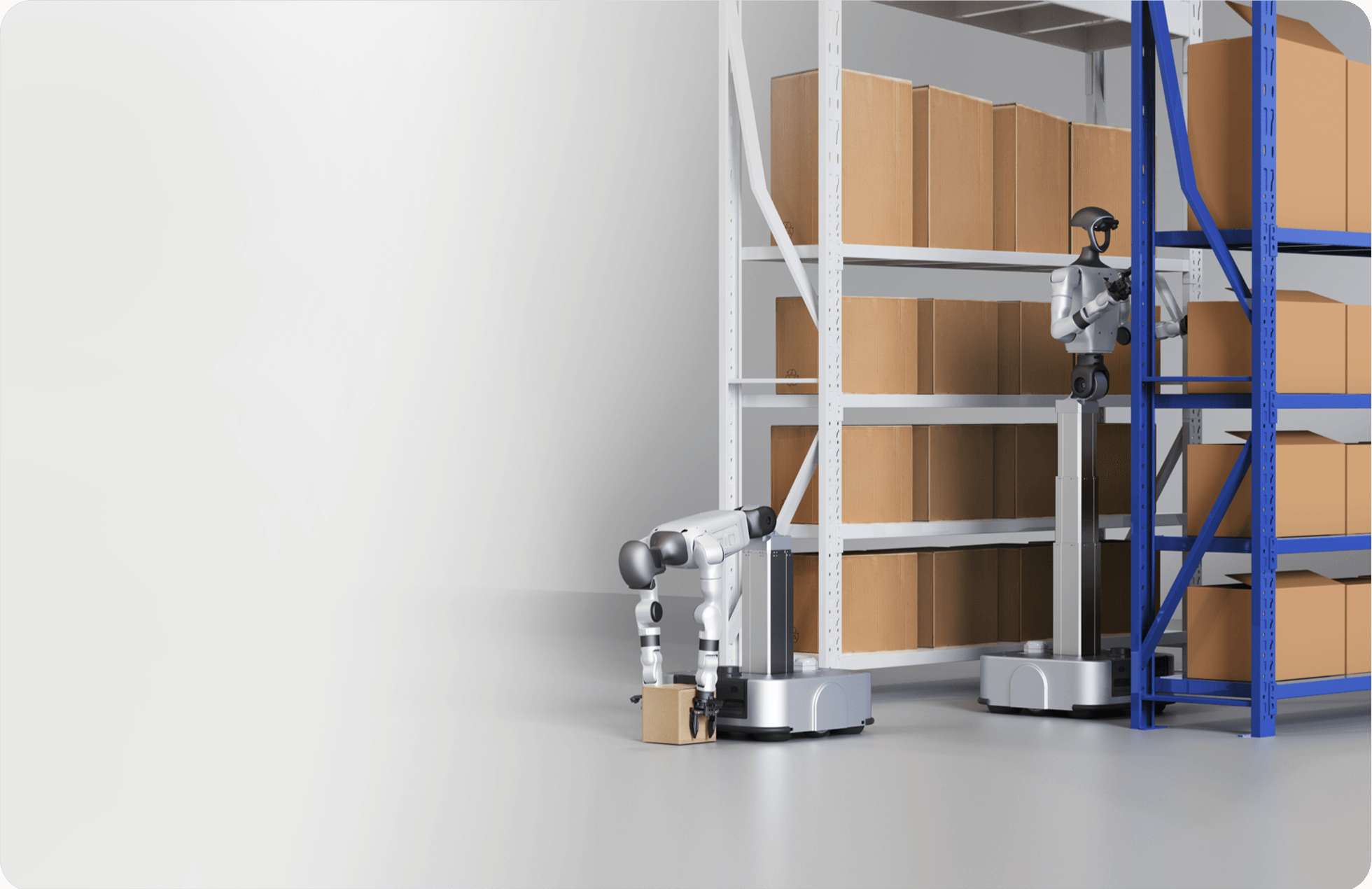
拡張された作業領域
車輪と昇降機構を組み合わせたモバイルリフティング設計を採用。
・垂直方向の作業範囲
0 ~ 2 m
・腰部可動域(Z軸)
±155°
・腰部可動域(Y軸)
-2.5° ~ +135°

低遅延の制御応答
±0.5 mm
・エンドエフェクタ(グリッパー)精度
±0.1 mm
※使用するエンドエフェクタの種類により精度は異なります。
・システムのテレオペレーション遅延
<100 ms
・サンプリングレート
60 Hz


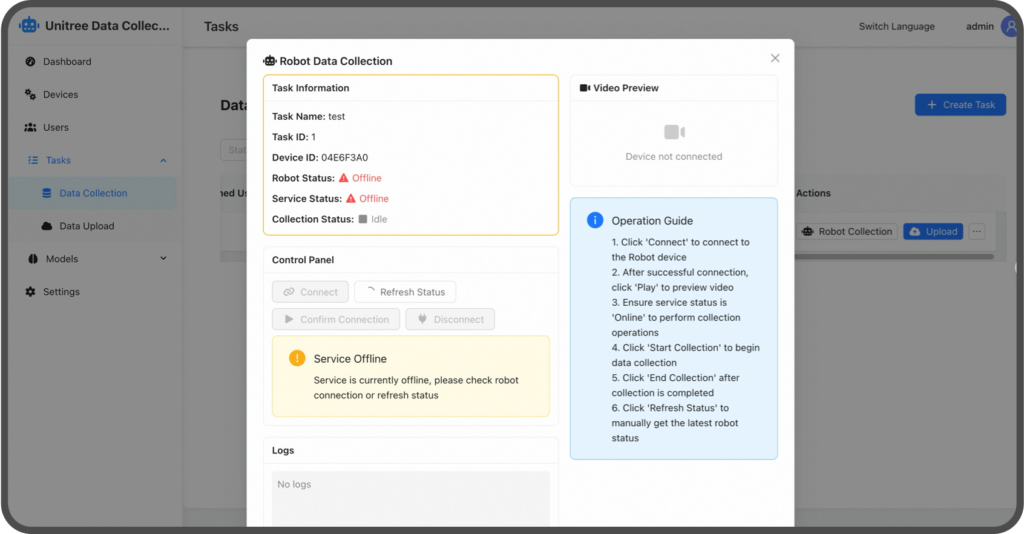
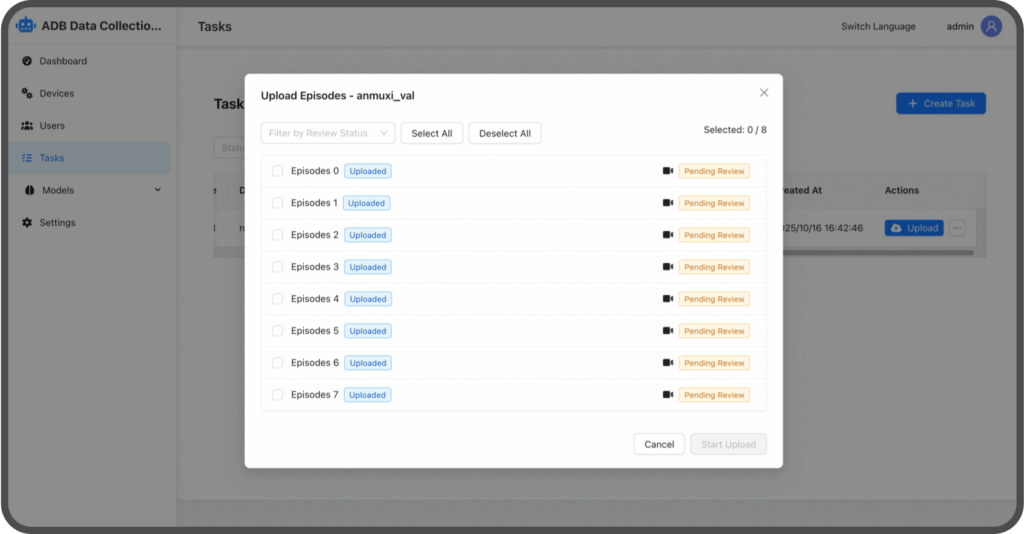
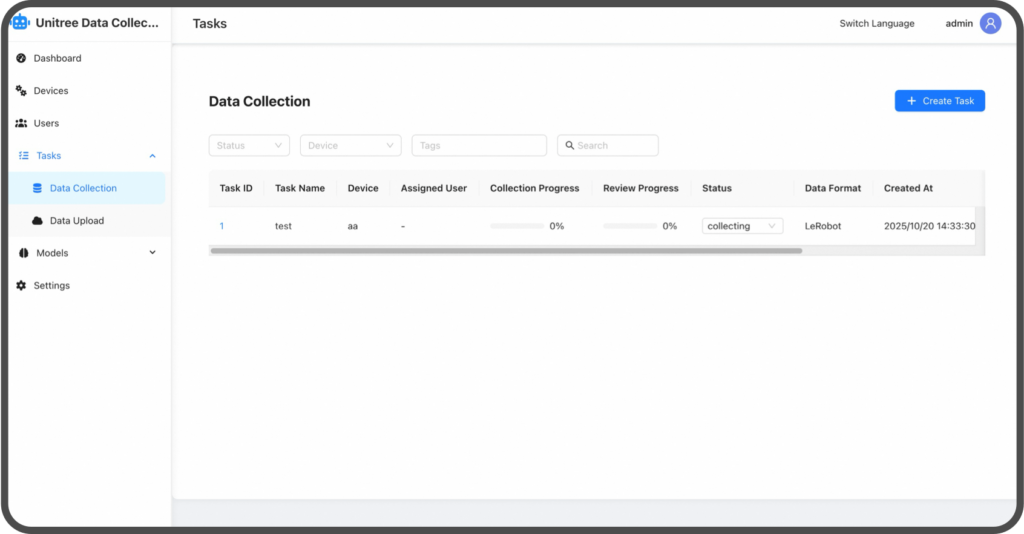
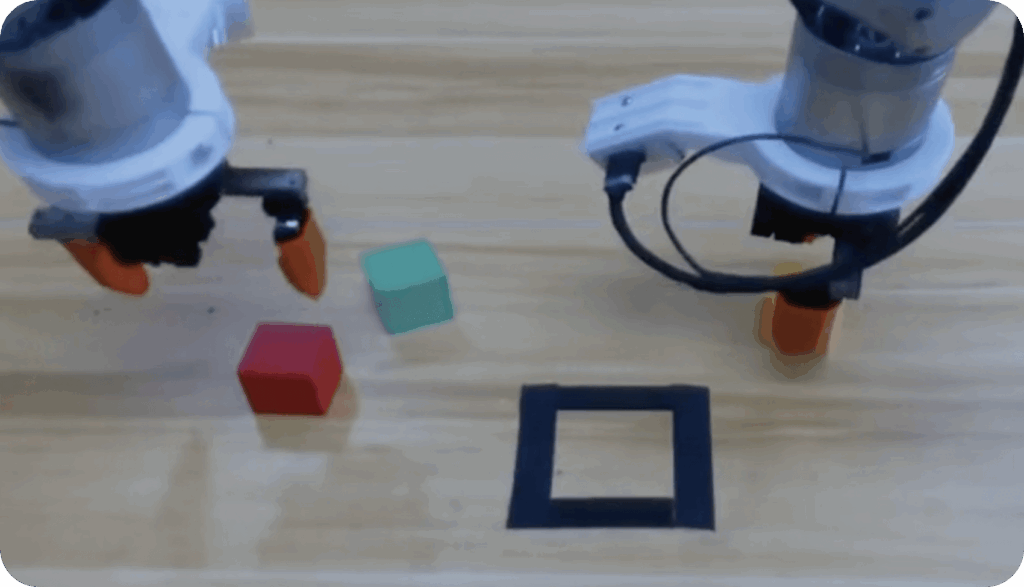
高可用性アーキテクチャを採用したことで、信頼性の高い 24/7 データ収集を実現。
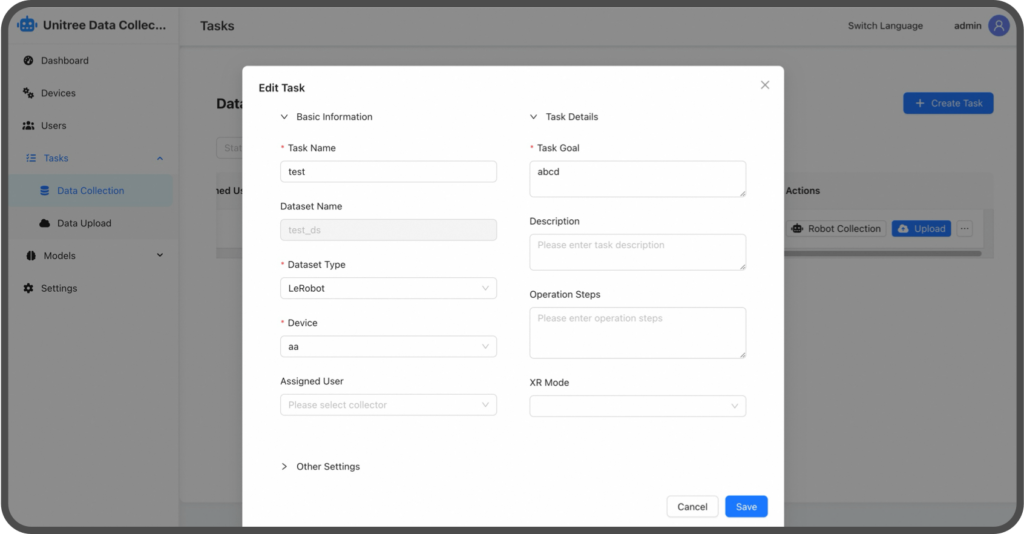
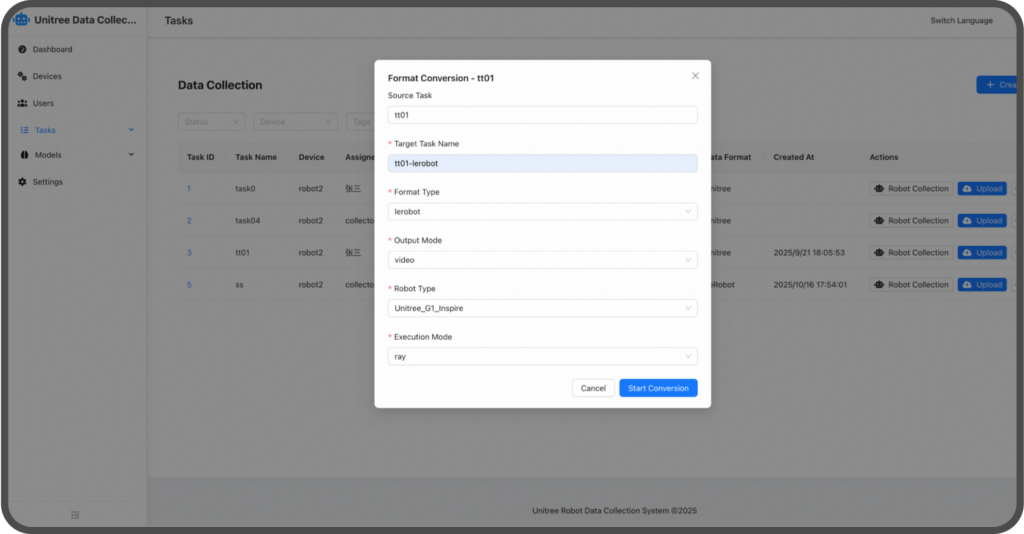
幅広いデータ形式に対応しており、取得したデータをそのまま出力したり、主流の学習データ形式へ変換したりできます。
これにより、研究開発のスピードを大幅に向上させます。
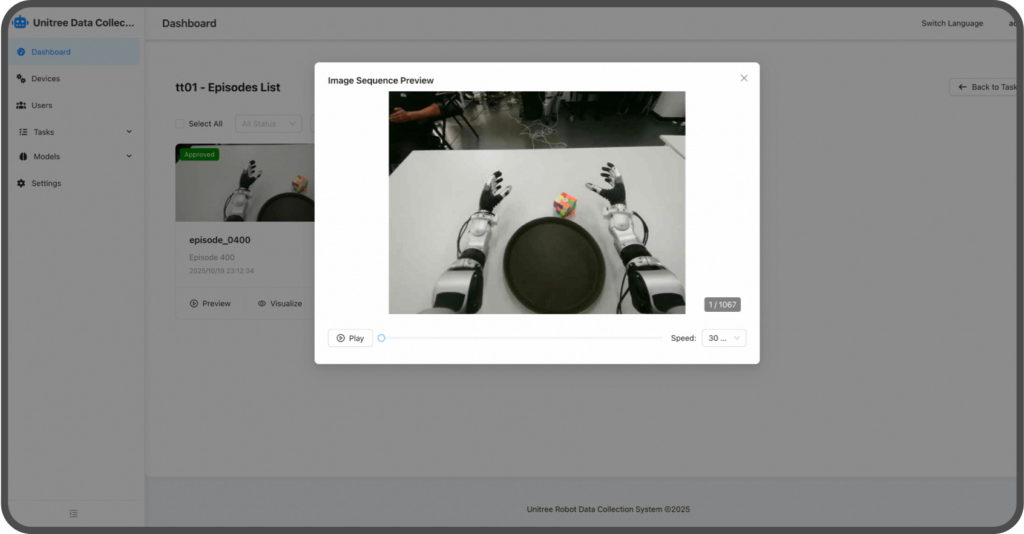


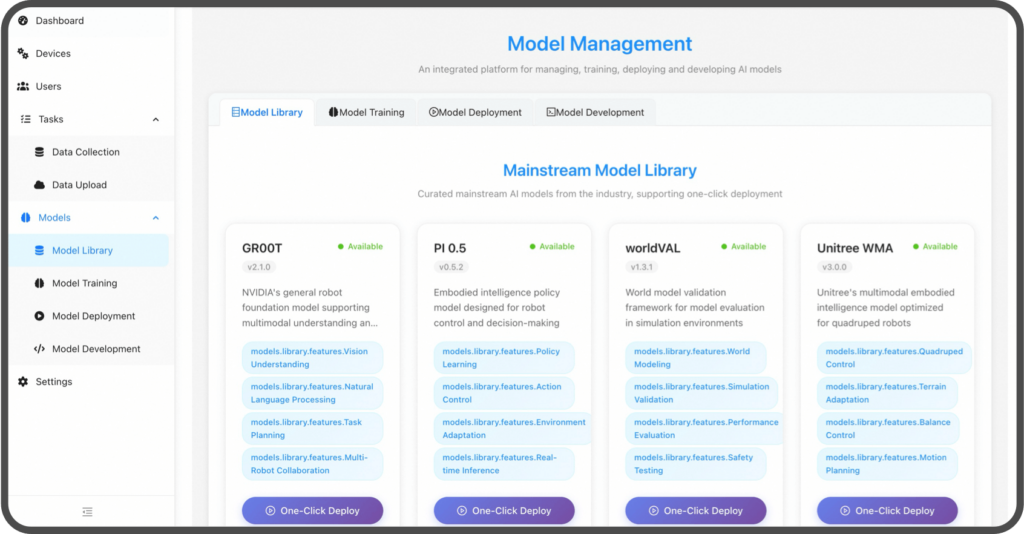
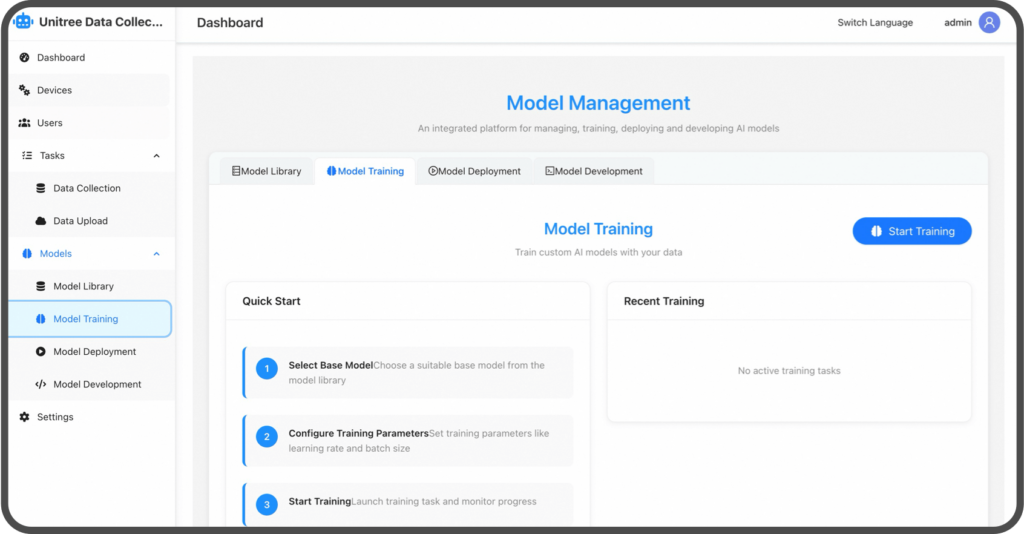
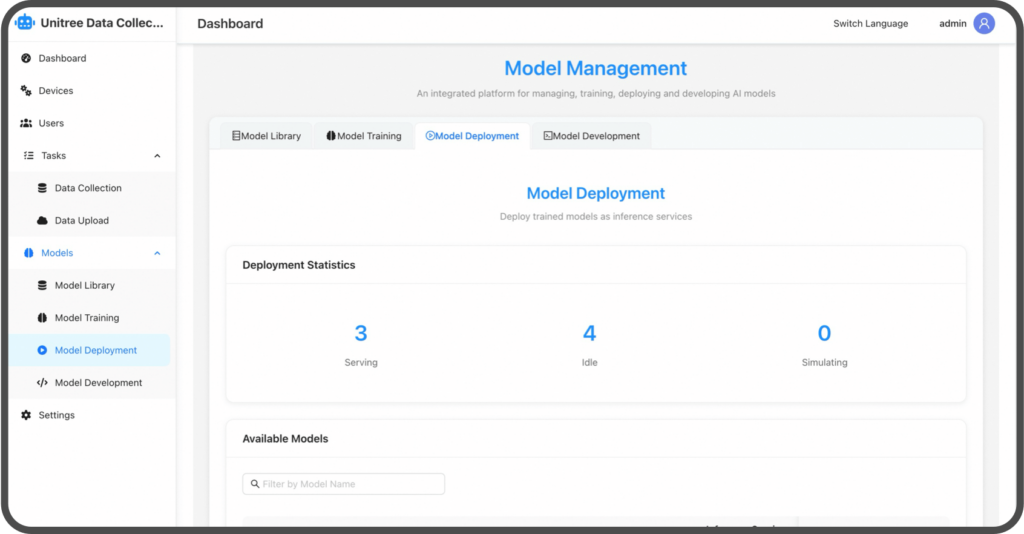
セットアップ時間を最小限に抑え、すぐに利用可能。
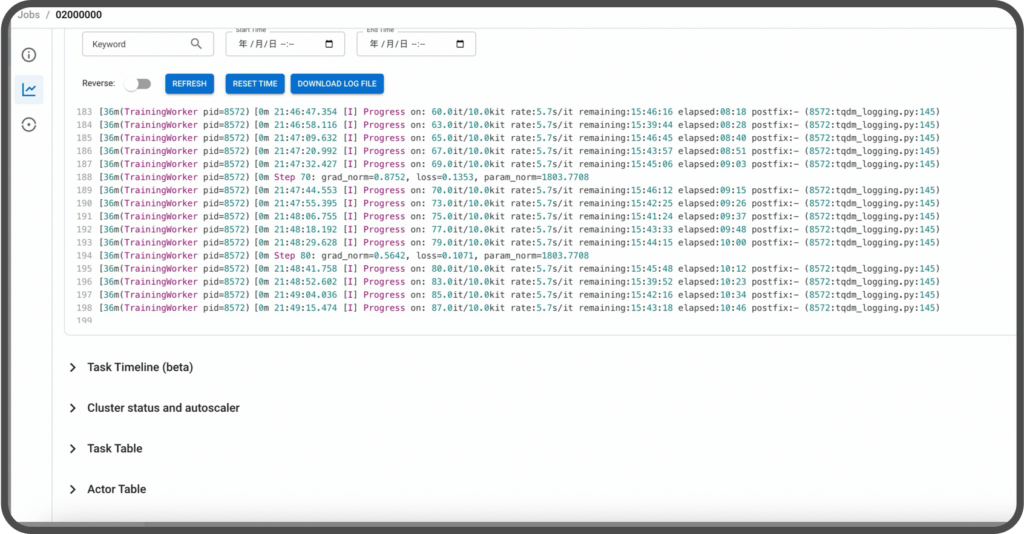
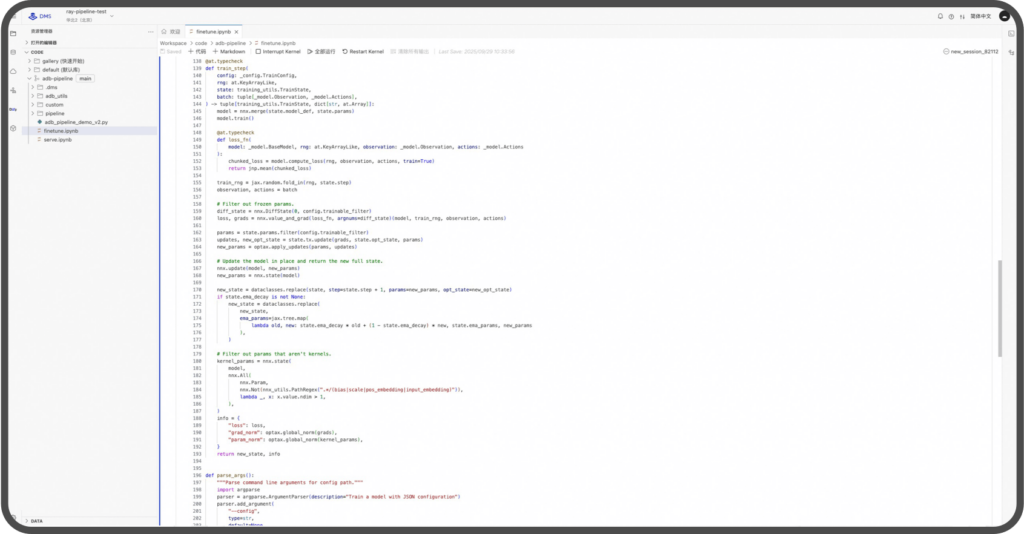
「ワンクリックトレーニング」で即座にモデル開発を開始し、統合されたシミュレーションツールで信頼性の高い評価を実施。アルゴリズムから実機へのスムーズな移行も可能です。
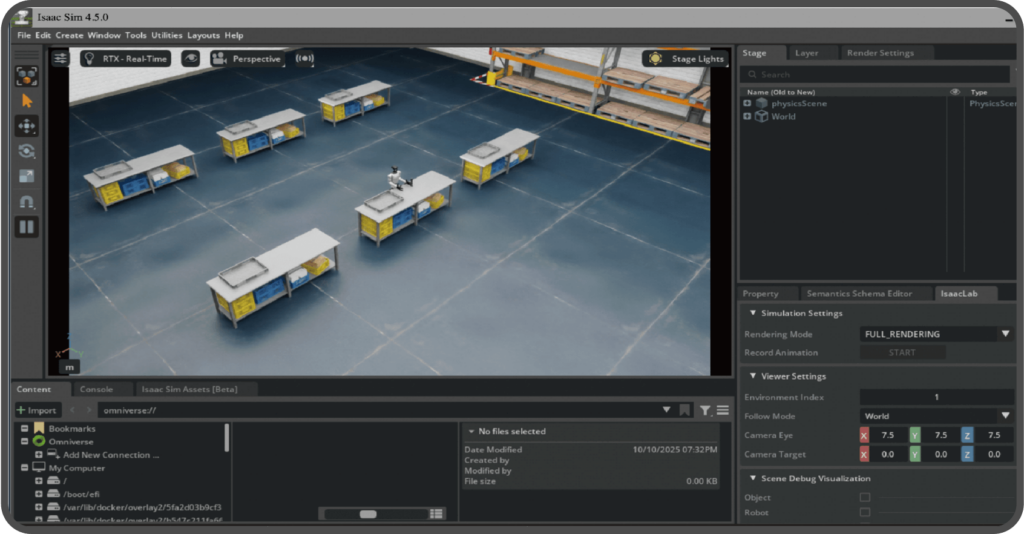
A World-Model-Action (WMA)フレームワーク
現在の環境状態やタスク目標を解析し、ロボットと周囲との 未来の物理的インタラクションを高精度に予測。この予測結果がポリシーモジュールを直接支援し、意思決定の誤差を減らしつつ、動作の正確性と合理性を最適化 します。
ロボットの動作入力に応じて、高精細な環境フィードバックを生成できるインタラクティブシミュレータ として機能します。高品質の合成データを大量に生成し、モデル学習やポリシー最適化に必要なデータソースを提供することで、学習プロセスを大幅に加速 します。
Unitree G1-D スペック表
| G1-D(Standard) | G1-D(Ultimate) | ||
| 機械寸法 | サイズ(最低高さ) | 1260×500×500 mm | 1260×525×570 mm |
| サイズ(最高高さ) | 1680×500×500 mm | 1680×525×570 mm | |
| 本体重量(バッテリーを含む) | 約50 kg | 約80 kg | |
| 自由度(エンドエフェクタ除く) | 17 DOF | 19 DOF | |
| 腕1本の自由度 | 7 | 7 | |
| 腕の最大ペイロード¹ | 約3 kg | 約3 kg | |
| エンドエフェクタオプション | 2-Fingerグリッパー/3-Finger(タッチ無)/3-Finger(タッチ有)/5-Finger | 2-Fingerグリッパー/3-Finger(タッチ無)/3-Finger(タッチ有)/5-Finger | |
| 腰の自由度 | 2 | 2 | |
| 腰の関節可動範囲 | Z軸:±155°/Y軸:-2.5°〜+135° | Z軸:±155°/Y軸:-2.5°〜+135° | |
| 柱の昇降速度 | 約60 mm/s | 約60 mm/s | |
| ベースプレート | 最大移動速度 | – | 1.5 m/s |
| 走行方式 | – | 差動駆動、360°その場回転 | |
| シャーシセンサー | – | LiDAR ×1 + DepthCamera ×2 + 衝突センサー ×2 + 低障害物検知センサー ×2 | |
| 電源・電気仕様 | 基本演算能力 | 8コア高性能CPU | 8コア高性能CPU |
| 感知センサー | 頭部HD双眼カメラ ×1 + 腕部HDカメラ ×2 | 頭部HD双眼カメラ ×1 + 腕部HDカメラ ×2 | |
| 無線仕様 | Wi-Fi 6, Bluetooth 5.2 | Wi-Fi 6, Bluetooth 5.2 | |
| アクセサリー | 高性能コンピューティングモジュール | NVIDIA Jetson Orin NX 16GB(100TOPS) | NVIDIA Jetson Orin NX 16GB(100TOPS) |
| バッテリー | 上半身脱着バッテリー9Ah | シャーシ内蔵バッテリー30Ah | |
| 手動コントローラ | 有り | 有り | |
| 可視化コンピュータ | 有り | 有り | |
| その他 | 可動時間 | 約2時間 | 約6時間 |
| OTAアップグレード対応 | 有り | 有り | |
| 二次開発対応 | 有り | 有り | |
Unitree 体験セミナー

















- Unitree Supported Partner Program
- 本プログラムは、Unitree robotics製品を活用したロボットソリューションを、日本国内で広く社会に普及させること目的として、TechShareが正規代理店として展開するパートナープログラムです。パートナー企業の皆様と協力することで、より有効で、幅広いUnitree robotics製品を活用したロボットソリューションを日本国内で提供することで、利用ユーザの利便性や利用価値を高めることを目的としたプログラムとなります。
- Unitree Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、Unitree Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、Unitree製品ご活用の参考になれば幸いです。


TechShare株式会社 営業部 Unitreeチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:unitree@techshare.co.jp