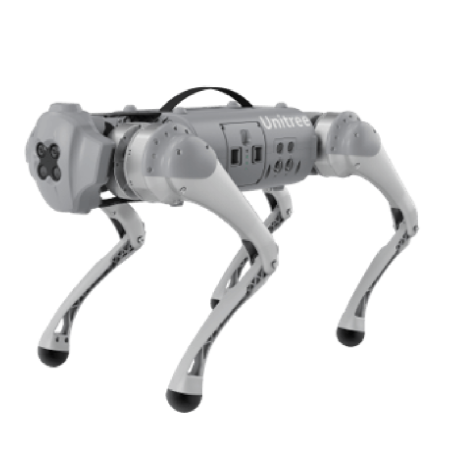
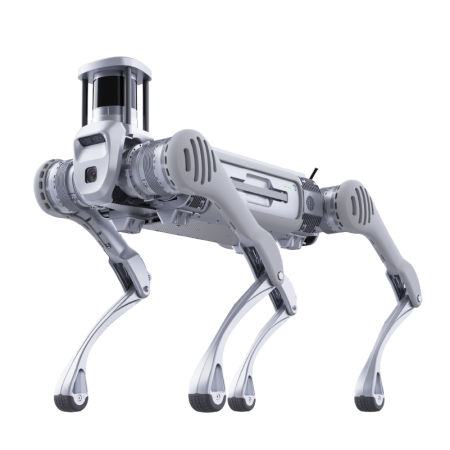
Aliengo 電動4足歩行ロボット

※本製品は現在取り扱いを終了しております。
AliengoはUnitree社が開発した電動4足歩行ロボット Unitree A1の12kgと比較すると、重量19kgとワンサイズ大きなロボット犬となります。また、ボストンダイナミクス社のスポットなど、30kg台の大型のロボットと比較すると少し小さい中型機となります。高度な運動性能と拡張性のあるマシンビジョン機能を搭載しているため、研究分野やエンターテイメントだけでなく、工場やプラント、トンネルや配管施設、工事現場、建設現場、農地、山林など不整地の多い現場で巡回監視や画像検査などでの利用が期待されるロボット犬です。
階段の昇降もできる走破能力
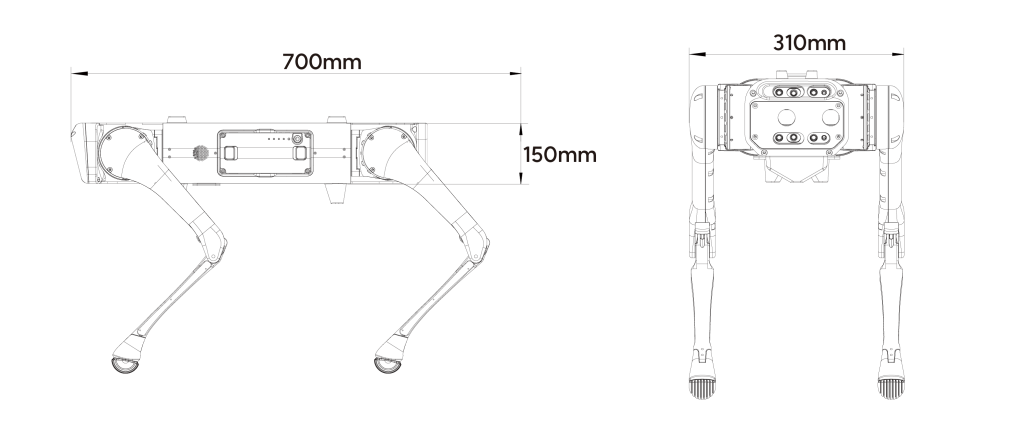
Aliengoは、立脚時のサイズが全長約 70cm× 幅31cm× 高さ60cmと、高さ40cmのUnitree A1より20cm高くなっています。また、段差の乗り越え能力は、A1の1.5倍の18cmまでの段差に対応しています。
不整地でも安定した高速走行が可能
Aliengoには、高性能のモーター、高精度の制御、センサー及びフットパッドなど、1クラス上のクオリティのパーツを採用しています。これらのクオリティパーツとその統合制御でIndustryレベルの高い不整地走破能力を実現しています。


エントリーモデルの A1 との主要スペック比較
Aliengo は、Unitree A1 の上位の機種となります。Aliengo は、ロボットのサイズがワンサイズ大きいだけでなく、連続稼働時間や障害物の乗り越え能力、不整地での安定した走破能力など様々な面で、A1 を大きく超え、Industry グレードの性能を実現しています。
| Unitree A1 | Aliengo | |
| 本体重量 | 12kg | 19kg |
| 本体サイズ | 約 50×30×40cm | 約 70 ×31×60cm |
| 最大歩行速度 | 3.3m/s | 1.5m/s |
| 連続稼働時間 | 約 1 時間 | 約 3.5 時間 |
| 可搬重量 | 5kg | 13kg |
| 最大登坂角度 | 22° | 30° |
Aliengoの基本仕様
マシン全体の特許出願中のデザインはUnitree社の開発技術によるものです。重量とエネルギー消費は最大限計算され、長い実用をもたらします。
- 本体サイズ:約 700 x 310 x600mm(立脚時)
- 本体重量:19kg
- 駆動方式:サーボモータ
- 本体自由度:12
- 構造・配置設計 :独自設計(特許取得済)
- 本体IMU:1コ
- 足先力センサー:4コ
- 深度センサー:2コ
- 自己位置推定カメラ:1コ
Aliengoの特徴
大幅に改善された段差乗り越え能力
Aliengo は、A1 と比較して、大きな体格のため障害物の乗り越え能力は大幅に改善されています。長い脚と大きな稼働範囲の関節、高性能な制御アルゴリズムで障害物に対応しています。運動性能を支える自社開発の高性能モーター
胴体は、プラスチックや炭素繊維、航空アルミニウムといった環境に配慮した素材でできています。また関連製品の環境安全認証を取得していて防御能力は極めて高く、胴体は統合されたデザインです。不整地での走行安定性
Aliengo では、グリップ力が高く耐久性が確保された Foot pad が採用されています。廉価版の A1 の Foot Pad と比較すると高負荷な運動への対応能力、耐久性、寿命も大幅に改善されています。狭い空間にも入れるコンパクトなボディ
Aliengo は、幅 31cm のスリムな機構のロボットです。一般的な AGV などでは通れない狭い経路でも、走行することができます。また、持ち運びの際にも、大きめのスーツケースに入るサイズなため新幹線での出張に携帯できる高いモバイル性を確保しています。
強化された視覚機能と処理プロセッサー
- 深度センサーx 2 台
- 歩行者認識用 x 1 台
- 地形認識用 x 1 台
- 自己位置認識用ステレオカメラx1 台
- ※視野角度約 170 度
- LiDAR オプション
さらに、胴体は衝撃に対して高い抵抗能力を持ち、走ったり、ジャンプしたり、衝突したり、落下した際の衝撃力にも耐えることができます。
関節部とバッテリーに冷却ファン搭載
Aliengo の関節部には、モータ空冷用のアクティブファンが実装されています。これにより、連続走行時のモータの高温による停止などを防ぎ、連続走行能力を大幅に改善しています。また、ボディ部にも、バッテリーとボードコンピュータ冷却のためのアクティブファンが実装されていますので、安定した連続走行が可能です。

安定した長時間駆動を実現
- 定格容量:12,600mAh 317.52Wh
- 定格電圧:25.2V
- 最大充電電圧:29.4V
- 連続稼働時間:3.5 時間

力制御技術による関節間の統合制御
3軸の姿勢や位置を完全にコントロールできるため、変化の富んだ地形への適応性が高く、砂利道や芝生の凸凹のある道路でも安定して走行できます。
Second Development
- Aliengoには、2コの深度カメラが搭載されており、それらは、ワイドな視野を持つグローバルシャッターのカメラで、高速移動中でもブレることなくカメラが動作します。
- 最短の計測可能距離は、約0.11m
- 深度センサーの解像度は、最大1280×720となります。
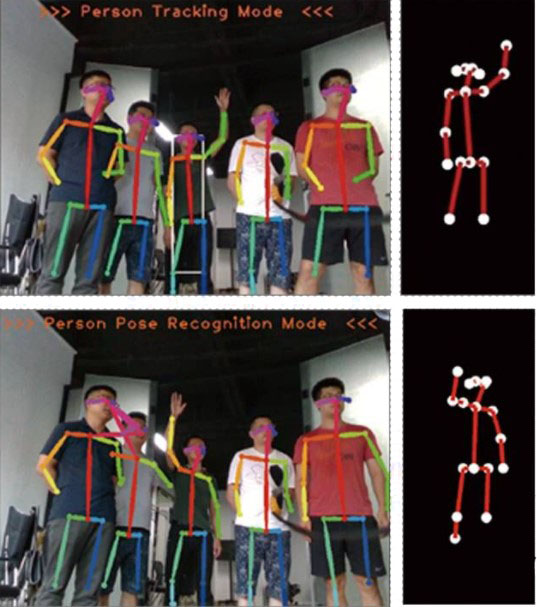
人間の骨格推定
ロボットは、視点から2 次元のカラー情報に基づいて、人体の骨格情報を分析・計算し、それらの結果を基に特定のキャラクターの三次元の骨格情報やモーション情報を推定することができます。
姿勢やジェスチャーの認識
ロボットは、視点から2 次元のカラー情報に基づいて、人体の骨格情報を分析・計算し、それらの結果を基に特定のキャラクターの三次元の骨格情報やモーション情報を推定することができます。
ターゲットの人物の特定と追跡
ロボットは、視点から2 次元のカラー情報に基づいて、人体の骨格情報を分析・計算し、それらの結果を基に特定のキャラクターの三次元の骨格情報やモーション情報を推定することができます。
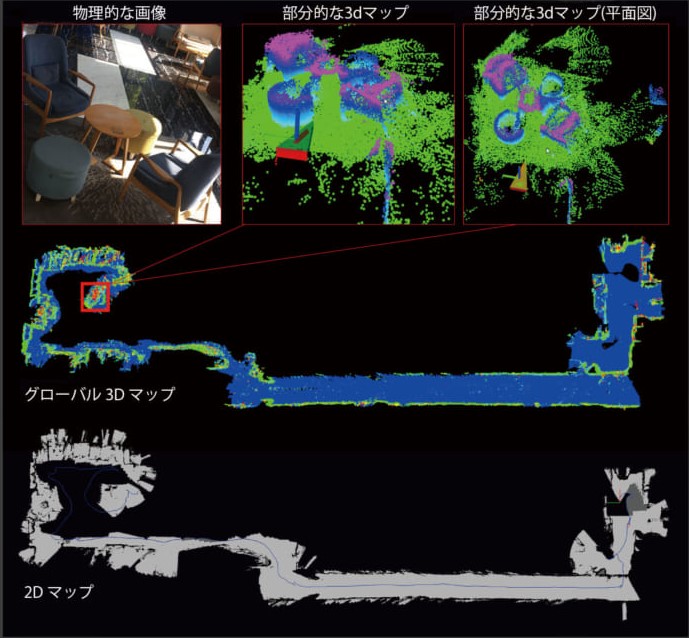
3D環境構築
運動の過程で、ロボットはカメラからの環境の色と奥行の情報を取得し、特定の視覚アルゴリズムを使用してオブジェクトの 3D 空間情報を再構築できます。
確率マップ
Octomap(確率マップ)は、ロボットが動くと同時にロボットの周囲を検出し、障害物データを提供するカメラを使用して再構築されます。
ダイナミックな障害物検知
ロボットが動的障害物に遭遇すると、特定の範囲内で現在のマップ日付を更新し、動的障害物によってマップ上に残された「移動アーティファクト」を破棄します。
グローバルポジショニング
マップ作成中、グローバル及びローカルのリアルタイムポジショニング機能を利用することができます。マップはカメラの視点にリアルタイムで追従し、リアルタイムズームイン、ズームアウト、移動、任意の回転をサポートします。
ループ検出
マップ作成中、グローバル及びローカルのリアルタイムポジショニング機能を利用することができます。マップはカメラの視点にリアルタイムで追従し、リアルタイムズームイン、ズームアウト、移動、任意の回転をサポートします。
ループ検出
マップ作成中、グローバル及びローカルのリアルタイムポジショニング機能を利用することができます。マップはカメラの視点にリアルタイムで追従し、リアルタイムズームイン、ズームアウト、移動、任意の回転をサポートします。
オープンな2開発環境と拡張性
- ソフトウエアの制御インターフェースは、ハイレベルのインターフェースとボトムレベルのインターフェースに分かれています。様々なセンサーのデータを読み取ったり、個別のモータまたは個別の足の運動を制御することができます。
- コントロールインターフェースは、C/C++、ROSなどをサポートしています。
豊富な外部インターフェース
- 開発者バージョンは、オンボードPCとオープンな通信インターフェースがあり、ビジョンカメラ、LiDAR、ロボットアーム、GPSシステムなど相互に制御可能な独自のモジュールを搭載することができます。
- 外部インターフェースには、HDMIx2、Ethernet portx2、USB3.0x2、USB2.0x1、485ポートx1が含まれます。

Unitree 体験セミナー

















- Unitree Supported Partner Program
- 本プログラムは、Unitree robotics製品を活用したロボットソリューションを、日本国内で広く社会に普及させること目的として、TechShareが正規代理店として展開するパートナープログラムです。パートナー企業の皆様と協力することで、より有効で、幅広いUnitree robotics製品を活用したロボットソリューションを日本国内で提供することで、利用ユーザの利便性や利用価値を高めることを目的としたプログラムとなります。
- Unitree Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、Unitree Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、Unitree製品ご活用の参考になれば幸いです。


TechShare株式会社 営業部 Unitreeチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:unitree@techshare.co.jp