Unitree A1

※本製品は現在取り扱いを終了しております。
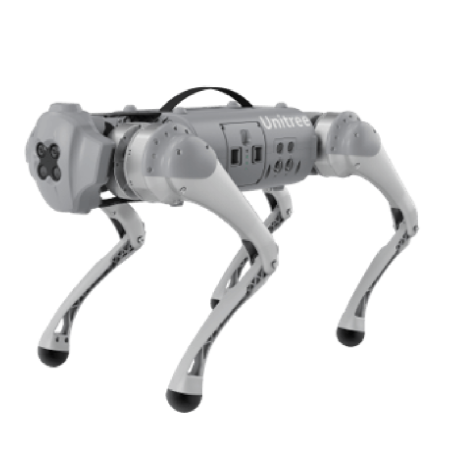
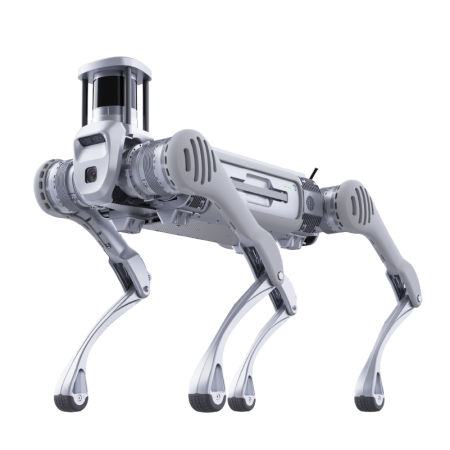
TechShareはUnitree Go1 R&D 日本総代理店です。Unitree A1は、Unitree社が開発した電動4足歩行ロボットです。
従来機のAliengo(重量19kg)と比較すると約12kgと小型で、機敏な運動性能を持つ低価格のロボット犬です。高度な運動性能と拡張性のあるマシンビジョン機能を搭載しているので、研究分野やエンターテーメントだけでなく、工場やプラント、トンネルや配管施設、工事現場などの巡回監視や画像検査作業などの実際の現場作業での利用が期待されるロボット犬です。
基本仕様
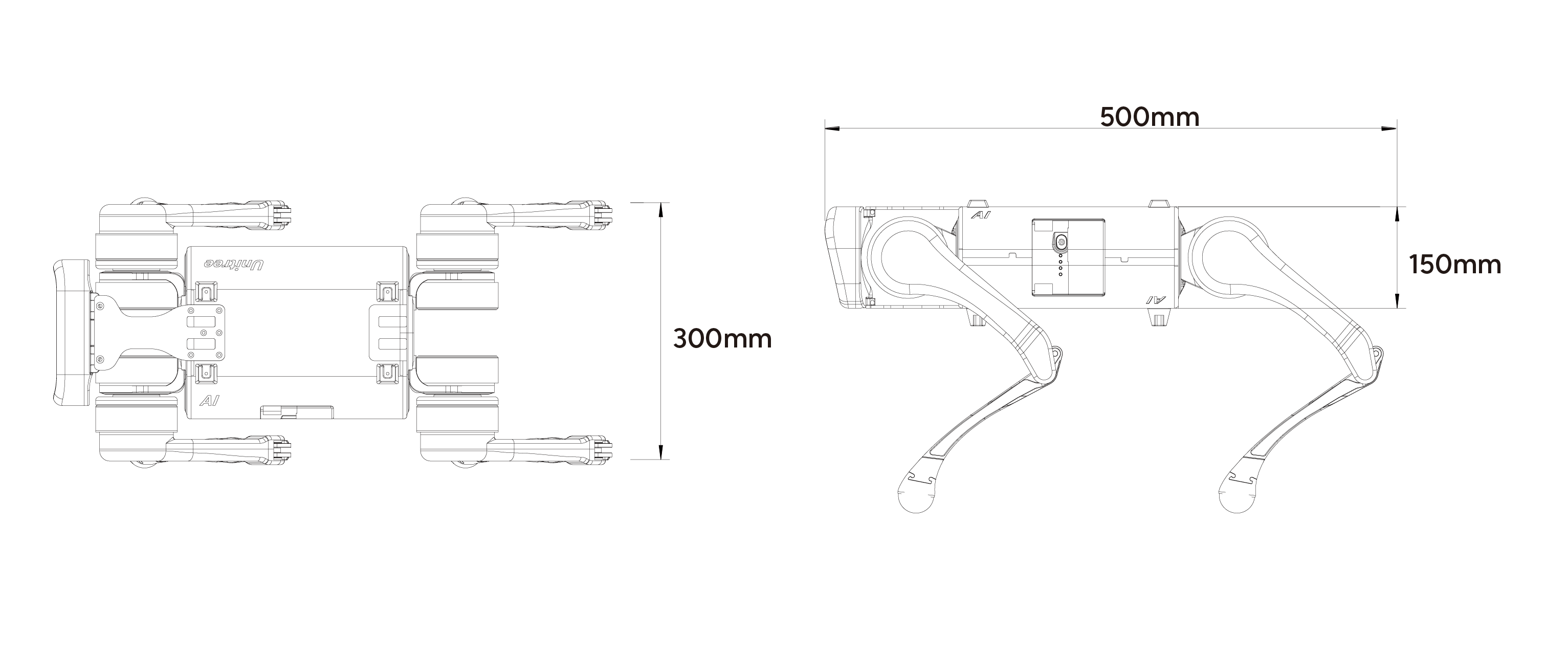
- 本体サイズ : 500×300×400mm(立脚時)
- 本体重量 : 12Kg
- 駆動方式 : サーボモータ(特許取得済みのPower System)
- 本体自由度 : 12
- 本体IMU : 1コ
- 足元力センサー : 4コ(特許取得済み)
- 深度センサー : RealSense D435
- OS : Ubuntu + ROS
主な運動性能
- 連続歩行時間 : 約1h
- 充電時間 : 1h
- 最大歩行速度 : 11.8km/h (3.3m/s)
- 最大登坂角度 : 35度

高速走行性能-Higher Running Speed
- 野外での最大走行速度は、3.3m/s(時速11.88km/h).
- Unitree A1は、中小型の4足歩行ロボットの市販マーケットで、もっとも早く、安定して走行できるロボットです。
- ジョギングの並走できるポテンシャルがあります。
ロバストな姿勢制御性能-Excellent Motion Stability
- 走行で突然の落下や段差のような状況の変化でも、Unitree A1の高度なバランス制御アルゴリズムにより即座にバランスを保ちます。

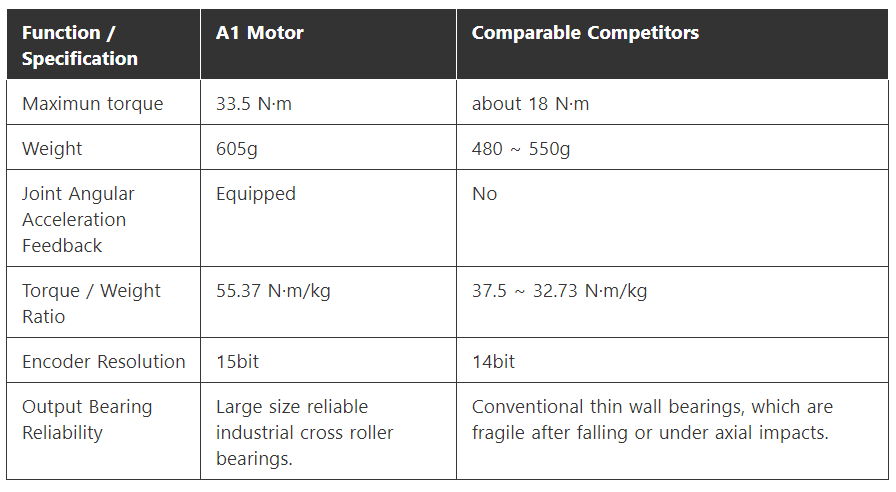
運動性能を支える独自開発のモータ技術-Patented Power System
- 独自開発のモータを含むUnitree A1の究極のパワーシステムがあらゆる面のロボット性能比較で優れた性能を実現しています。
- 独自開発の高トルクモータがUnitree A1の高速走行の実現に貢献しています。
Unitree社独自開発の高トルクのインテリジェントモータは、市販の類似モータと比較して、2倍近い高トルクを実現しています。また15bitのエンコーダを採用し、角加速度フィードバック制御も実装。更に、ロボットの高い負荷の運動の衝撃に耐えるため特殊な構造のベアリングを採用し、高い衝撃耐久性を実現した4足歩行ロボットのために開発された高性能・高耐久性のインテリジェントモータです。
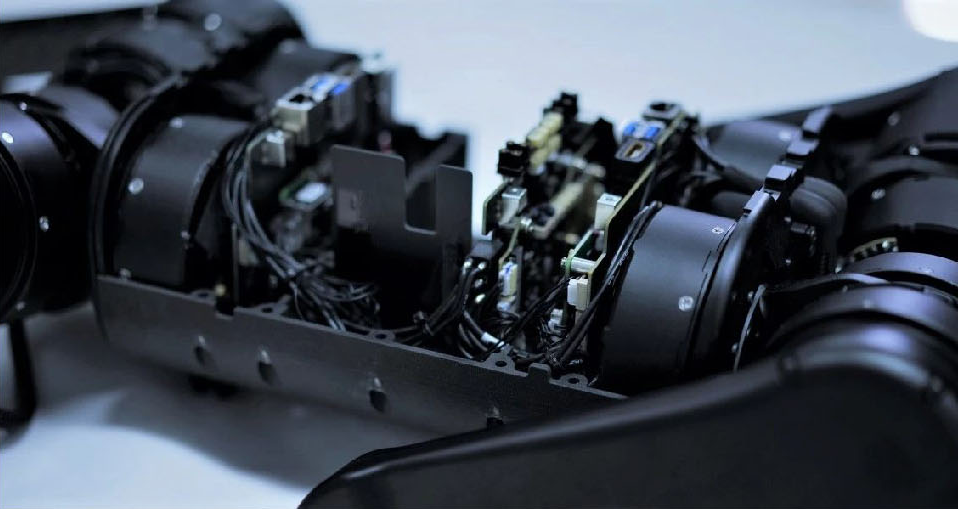
独自開発のボディ機構とレイアウト-Patented Body Structure and Layout
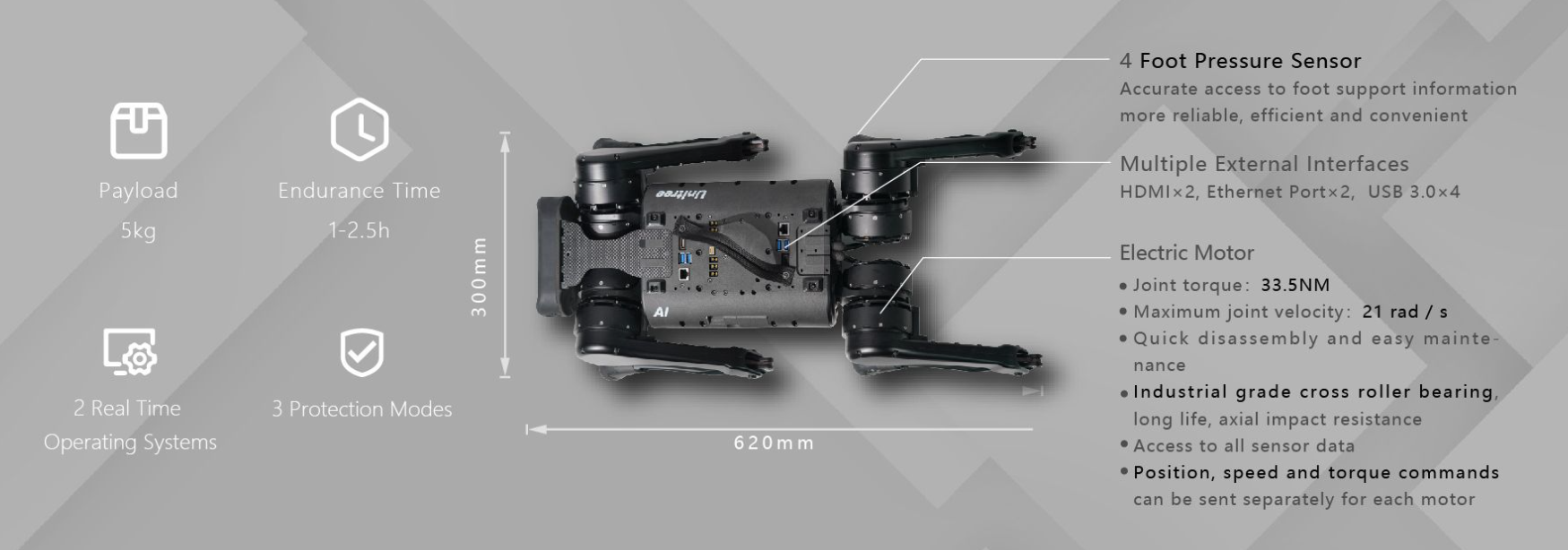
- メンテナンスが簡単な高耐久性の軽量ボディ構造、24Vの外部電源入力。追加の外部装置利用に便利な5V、12V、19Vの電源供給ポート
- センシングのコントロールと運動制御のための2つの高性能マスターコントローラを実装
- 外部インターフェース : USB × 4、HDMI × 2、Ethernet × 2
- マスターコントローラは、Jetson TX2にアップグレード可能
- 標準仕様のUnitree A1には、RealSenseの深度カメラが実装されています
- SLAMの地図作成と障害物回避が可能です
独自開発の足先の力覚センサー-Patented Sensitive foot contact
- 各足先に実装された力覚センサーで、ロボットは、どのような状況下でも、リアルタイムで足先の接触状態を簡単に把握できます
- モータの電流値を使って足の接触を推定するシステムと比較して、もっと正確で高い感度を実現しています
- 足先の力覚センサーとモータ電流により推定するセンサーを統合して、更に高感度で信頼性を確保しています
- マスターコントローラは、Jetson TX2にアップグレード可能
- 足先のフットパッド(力覚センサー)は、防水性と防塵性があり、切れたり、摩耗した際には、交換も可能です。

ビジョンベースの目標物の追尾-Vision-based Object Tracking
- 視覚範囲内のリアルタイムの目標物の検知・トラッキング
- ターゲットの特徴のオンラインでの機械学習をサポート
- カラーボックスを使った認識確度の表示(Green->Red、100%->0%)

ビジョンベースの障害物回避-Vision-based Obstacle Avoidance
- 視覚範囲内の0.8m以内の障害物回避
- ロボットのボディポジション調整のための障害物形状の検知機能
- ロボットボディの調整、視覚範囲内の最大距離と視覚角度とエリア、歩行経路の範囲のリアルタイム表示

高性能LiDAR搭載オプション-Choose To Assemble High Precision Lidar
- 地図作成、自立ポジショニング、ナビゲーションプランニングとダイナミックな障害物回避
- A1 Explorerバージョンを選択すれば、機械学習にも利用できるJetson TX2にコントローラもアップグレード(通販ページ)

卓越したソフトウエアとハードウエアの信頼性-Outstanding Software and Hardware Reliability
- 6年以上の4足歩行ロボット分野での実績
- CES2020会期中に80回のバク宙パフォーマンスに耐える耐久性
- 使われたClosed-Loopのバク宙アルゴリズムで運動の安定性を証明

コンパクトな専用ケース付で携帯も簡単-Easy to carry with compact system case
コンパクトな専用のシステムケースが付属されているので、出張などへのロボット携帯も簡単です。
※A1ロボット用のバッテリーの航空機への持ち込みはできません。
Unitree 体験セミナー
弊社はUnitree製品のスペック・特徴のほか、体験型演習を通じて電動4足歩行ロボットプログラミングの基礎を学べるセミナーを定期的に開催しております。エントリーモデルUnitree Go2/Go1や、40 cmの段差が登れるなどIndustry Levelの高性能を実現した、最新機種Unitree B2についてご紹介いたします。2次開発例について実機デモを交えながらご紹介する他、会場では数多くのUnitreeデモ機をご覧いただけますので、是非ご参加ください。
Unitree 各ロボット









Unitree 関連製品








関連情報
- Unitree Supported Partner Program
- 本プログラムは、Unitree robotics製品を活用したロボットソリューションを、日本国内で広く社会に普及させること目的として、TechShareが正規代理店として展開するパートナープログラムです。パートナー企業の皆様と協力することで、より有効で、幅広いUnitree robotics製品を活用したロボットソリューションを日本国内で提供することで、利用ユーザの利便性や利用価値を高めることを目的としたプログラムとなります。
- Unitree Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、Unitree Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、Unitree製品ご活用の参考になれば幸いです。

通販サイト

お問合せ先
TechShare株式会社 営業部 Unitreeチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:unitree@techshare.co.jp
会社情報