Unitree H2
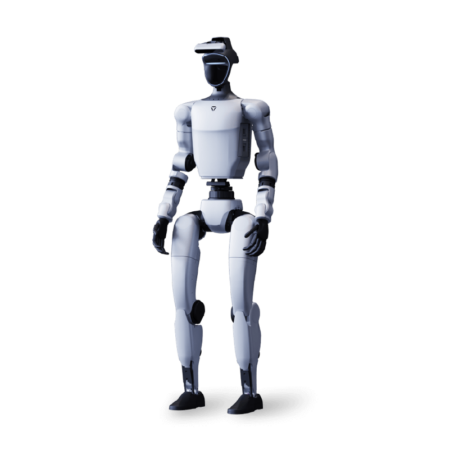
Unitree H2は、全高約180cmかつ31自由度の関節構造を備えたフルサイズのヒューマノイドロボットです。全身協調制御に対応する高自由度設計と、高出力アクチュエータにより、複雑かつダイナミックな動作を実現します。さらに、最大2070TOPSの高性能計算基盤を搭載可能で、AI処理や自律制御、Embodied AIの研究開発にも対応します。人間環境への適応性を活かし、研究用途から人作業の自動化検証まで、ヒューマノイド開発の幅広い領域で活用可能です。
※Unitree H2の製品情報は、Unitree社が2025年10月20日付で公開いたしました。現在、弊社にて先行予約販売の準備を進めておりますので、今しばらくお待ちください。
高自由度構造と全身協調制御
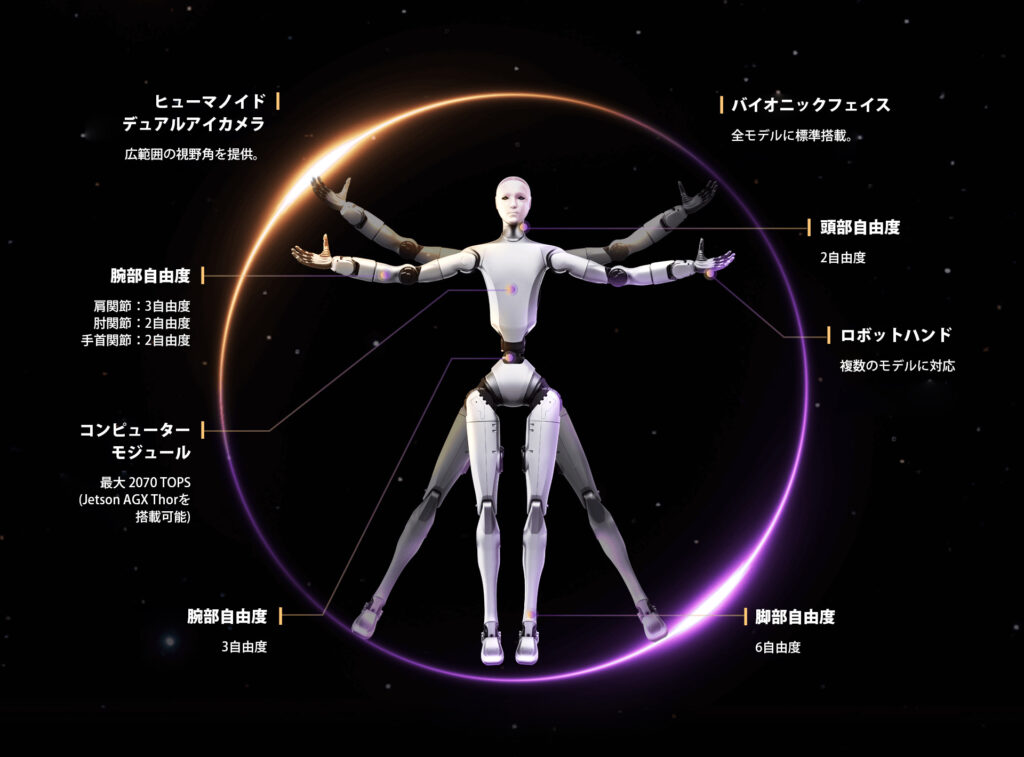
全高約180cmのフルサイズの人型設計により、人間環境への高い適応性を確保しています。全身31自由度の関節構成と全身協調制御により、脚部・上肢・体幹を統合した柔軟かつ安定した動作制御を実現します。
高出力アクチュエータによる動作性能
高トルクアクチュエータを採用し、脚部最大360N・m、上肢最大120N・mの出力性能を実現しています。高出力とリアルタイム応答性を両立し、ダイナミックかつ安定した動作性能を発揮します。
高性能コンピューティングによる動作生成・制御基盤
高性能コンピューティングモジュールを搭載し、視覚認識や動作生成、全身制御処理に対応します。
オプション構成では最大2070TOPSの演算性能を発揮し、Embodied AIおよびリアルタイム制御処理を支えるとともに、人型ロボットの適用領域拡張を継続的に推進します。
スペック表
| モデル | H2 | H2(開発版) |
|---|---|---|
| 高さ・幅・厚さ(立ち状態) | 1820 x 456 x 218 mm | 1820 x 456 x 218 mm |
| バッテリー搭載重量 | 約 70 kg | 約 70 kg |
| 自由度(関節モーター数) | 31 | 31 |
| 片脚の自由度 | 6 | 6 |
| 片腕の自由度 | 7 | 7 |
| 腰部の自由度 | 3 | 3 |
| 頭部の自由度 | 2 | 2 |
| ハンド(Dexterous Hand) | ー | Dexterous Hand(複数モデル選択可) |
| 関節出力軸受 | 工業級クロスローラーベアリング(高精度・高耐荷重) | 工業級クロスローラーベアリング(高精度・高耐荷重) |
| 関節モーター | 低慣性・高速インナーロータ型永久磁石同期モーター (より優れた応答速度と放熱性能) | 低慣性・高速インナーロータ型永久磁石同期モーター (より優れた応答速度と放熱性能) |
| 腕部 最大関節ピークトルク | 120N.m | 120N.m |
| 脚部 最大関節ピークトルク | 360N.m | 360N.m |
| 腕部 最大可搬重量 | ピーク:約15kg/定格:約7kg | ピーク:約15kg/定格:約7kg |
| 下腿 + 大腿の長さ | 1045 mm | 1045 mm |
| 前腕 + 上腕の長さ | 690 mm | 690 mm |
| 筐体素材 | 航空アルミ + チタン合金 + 高強度エンジニアリングプラスチック | 航空アルミ + チタン合金 + 高強度エンジニアリングプラスチック |
| 冷却方式 | 空冷 | 空冷 |
| 電源方式 | 低内部抵抗の高品質リチウム電池 | 低内部抵抗の高品質リチウム電池 |
| バッテリー容量 | 容量 15Ah(0.972kWh) | 容量 15Ah(0.972kWh) |
| バッテリー電圧 | 最大電圧 75.6V | 最大電圧 75.6V |
| 基本計算能力 | PC1:Intel Core i5(プラットフォーム機能) | PC1:Intel Core i5(プラットフォーム機能) PC2:Intel Core i7(ユーザー開発用) |
| 認識センサー | ステレオカメラ | ステレオカメラ |
| 音声インタラクション | アレイマイク + スピーカーによる音声対話 | アレイマイク + スピーカーによる音声対話 |
| WiFi6、Bluetooth 5.2 | 〇 | 〇 |
| 高性能計算モジュール | ー | Jetson AGX Thor(2070 TOPS)を選択可能 |
| 手動コントローラー | 〇 | 〇 |
| 連続稼働時間 | 約 3 時間 | 約 3 時間 |
| OTAアップデート | 〇 | 〇 |
| 二次開発 [2] | ー | 〇 |
[2] 詳しくは二次開発マニュアルをお読みください。
[3] 詳しい保証条件については、製品保証パンフレットをお読みください。
[4] 人型ロボットは複雑な構造と非常に強力なパワーを備えています。ヒューマノイドロボットとの間に十分な安全距離を保ってください。
[5] 製品の外観に変更がある場合は、実際の製品を参照してください。
[6]本ページに掲載されているサンプル機能の一部は、現在開発・検証中のものであり、今後ユーザーに公開される予定です。
Unitree 体験セミナー

















- Unitree Supported Partner Program
- 本プログラムは、Unitree robotics製品を活用したロボットソリューションを、日本国内で広く社会に普及させること目的として、TechShareが正規代理店として展開するパートナープログラムです。パートナー企業の皆様と協力することで、より有効で、幅広いUnitree robotics製品を活用したロボットソリューションを日本国内で提供することで、利用ユーザの利便性や利用価値を高めることを目的としたプログラムとなります。
- Unitree Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、Unitree Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、Unitree製品ご活用の参考になれば幸いです。


TechShare株式会社 営業部 Unitreeチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:unitree@techshare.co.jp