Unitree Dex5-1(Dexterous Hand)

Unitree「Dex5-1」は、20自由度を誇るフルアクチュエーションの五指型デクスタラスハンドです。人間の手に限りなく近い構造と動作性能を追求し、複雑な操作タスクや多指協調動作を必要とする研究開発・実装用途に最適です。
Dex5-1
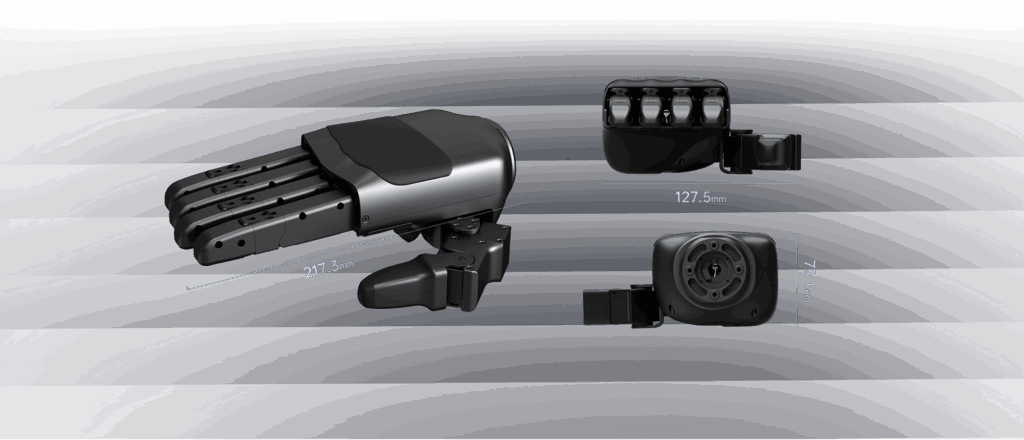
Dex5-1は、20自由度を誇るフルアクチュエーションの五指型デクスタラスハンドです。人間の手に限りなく近い構造と動作性能を追求し、複雑な操作タスクや多指協調動作を必要とする研究開発・実装用途に最適です。


各指は独立制御され、親指には4自由度、他の4本指にはそれぞれ3自由度を確保。独自開発の力制御型複合関節と高精度のモーター制御により、物体の把持・リリース・繊細な操作をスムーズかつ確実に実現します。4本指に±22°の横方向スイング機構を備えています。これにより、対象物の形状や曲面に柔軟に追従し、安定した把持が可能となります。
拡張モデル「Dex5-1P」では指先および手のひらに合計94個の圧力センサを搭載し、触覚フィードバックを通じた応答制御や力加減の学習が可能です。強化学習、遠隔操作、触覚研究など、最先端のヒューマノイドアプリケーションに対応するフラッグシップモデルです。

スペック表
| 本体スペック | ||
| Dex5-1 | Dex5-1P | |
| 重量 | 1000g | 1000g |
| サイズ | 217.3mm × 127.5mm × 72.1mm (最終出荷バージョンで変更の可能性あり) | 217.3mm × 127.5mm × 72.1mm (最終出荷バージョンで変更の可能性あり) |
| 自由度 | 親指:4 人差し指:3 中指:3 薬指:3 小指:3 | 親指:4 人差し指:3 中指:3 薬指:3 小指:3 |
| 駆動機構 | 独自開発の力制御複合関節 ×12 (触覚と固有感覚を実現) ギア駆動の力制御関節 ×4 | 独自開発の力制御複合関節 ×12 (触覚と固有感覚を実現) ギア駆動の力制御関節 ×4 |
| 関節角度 | 親指関節 関節0:-33.5°~39° 関節1:0°~100° 関節2:0°~110° 関節3:0°~92° 他4指関節 関節0:-22°~22° 関節1:0°~90° 関節2:0°~95° 関節3:0°~81°(関節2と連動) | 親指関節 関節0:-33.5°~39° 関節1:0°~100° 関節2:0°~110° 関節3:0°~92° 他4指関節 関節0:-22°~22° 関節1:0°~90° 関節2:0°~95° 関節3:0°~81°(関節2と連動) |
| 4指横方向スイング | ±22° | ±22° |
| 最小把持直径 | 10mm | 10mm |
| 指先の繰返し位置精度 | ±1mm | ±1mm |
| 指先の出力 | 10N | 10N |
| 動作電圧範囲 | 24V~60V | 24V~60V |
| 静止電流 | 58V@0.2A | 58V@0.2A |
| 最大電流 | 58V@3A | 58V@3A |
| 通信インターフェース | USB2.0 | USB2.0 |
| 動作温度範囲 | -20℃~60℃ | -20℃~60℃ |
| 把持性能 | ||
| Dex5-1 | Dex5-1P | |
| 手のひらを下に向けた状態で5cm硬球を把持 | 最大3.5kg | 最大3.5kg |
| 手のひらを左に向けた状態で5cm硬球を把持 | 最大4.5kg | 最大4.5kg |
| センサ関連 | ||
| Dex5-1 | Dex5-1P | |
| 圧力センサ数 | - | 12個(合計94センサ) |
| 配列解像度 | - | 2×5(手のひら) 2×3(各指パッド×5) 2×3(各指先×5) 2×3(各指根元×4) |
| 知覚範囲 | - | 10g~2500g |
| 最大許容荷重(未損傷) | - | 20kg |
| ソフトウェア機能 | ||
| Dex5-1 | Dex5-1P | |
| 通信レート | 1000Hz | 1000Hz |
| パケットサイズ | 送信:1234バイト 受信:1270バイト | 送信:1234バイト 受信:1270バイト |
| 知覚フィードバック | 関節モード、位置、速度、トルク、温度、電圧・電流、IMUデータ | 上記に加え、 センサ圧力値、センサ温度値 |
| 制御フィードバック | 関節モード、位置、速度、トルク、剛性係数、減衰係数 | 関節モード、位置、速度、トルク、剛性係数、減衰係数 |
Unitree 体験セミナー
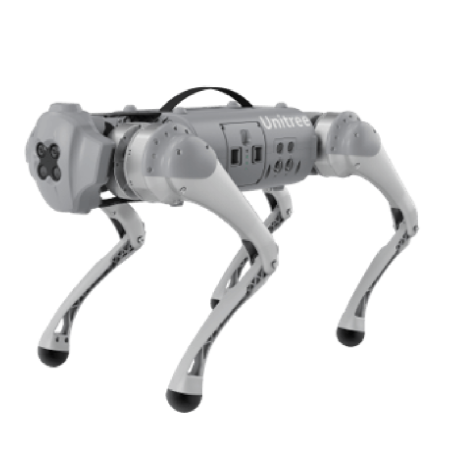
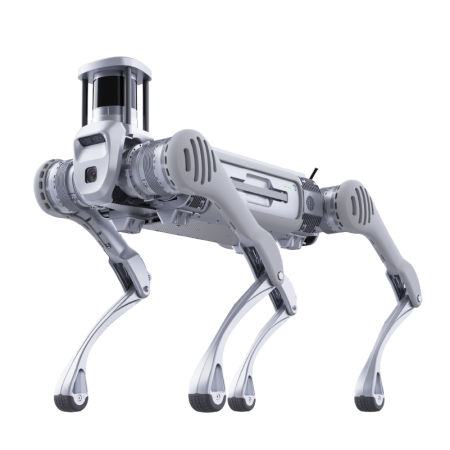
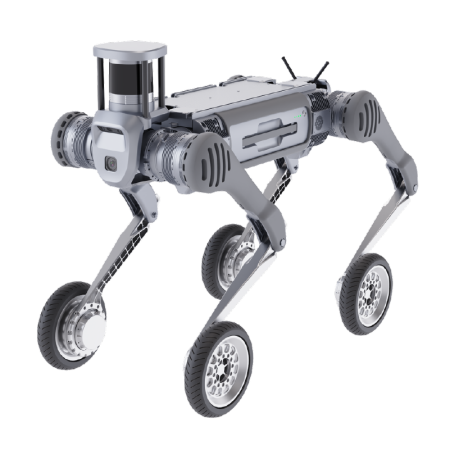
弊社はUnitree製品のスペック・特徴のほか、体験型演習を通じて電動4足歩行ロボットプログラミングの基礎を学べるセミナーを定期的に開催しております。エントリーモデルUnitree Go2/Go1や、40 cmの段差が登れるなどIndustry Levelの高性能を実現した、最新機種Unitree B2についてご紹介いたします。2次開発例について実機デモを交えながらご紹介する他、会場では数多くのUnitreeデモ機をご覧いただけますので、是非ご参加ください。
Unitree 各ロボット









Unitree 関連製品







関連情報
- Unitree Supported Partner Program
- 本プログラムは、Unitree robotics製品を活用したロボットソリューションを、日本国内で広く社会に普及させること目的として、TechShareが正規代理店として展開するパートナープログラムです。パートナー企業の皆様と協力することで、より有効で、幅広いUnitree robotics製品を活用したロボットソリューションを日本国内で提供することで、利用ユーザの利便性や利用価値を高めることを目的としたプログラムとなります。
- Unitree Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、Unitree Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、Unitree製品ご活用の参考になれば幸いです。

通販サイト

お問合せ先
TechShare株式会社 営業部 Unitreeチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:unitree@techshare.co.jp
会社情報