
目次
1. はじめに
本稿では、DH-Robotics社が販売している電動グリッパーPGSE 15-7をMG400に取り付けて使用するまでの方法をご案内します。
[注意]NovaシリーズやCR,CRAシリーズ向けの内容ではございません。あらかじめご了承ください。
[注意]本稿は「PGSE」グリッパーの導入方法です。類似品の「小型電磁グリッパー」「小型電動グリッパー」の導入方法につきましては下記リンクよりご参照ください。
[MG400] 小型電磁グリッパーキット導入方法 – TechShare FAQ
[MG400] 小型電動グリッパーキット導入方法 – TechShare FAQ
本稿の内容に入る前に事前にMG400及びDobotStudio Proのセットアップをお済ませください。
[MG400, M1Pro] DobotStudioPro セットアップ方法 – TechShare FAQ
2. 用意するもの
下記の物品をご用意ください。

「MG400用変換プレート」は弊社よりグリッパキットをご購入いただいた際にPGSE本体に同梱しております。
爪先は必要に応じてお客様で作成ください。
3. 導入方法
3-1. 変換プレートの取り付け
step1
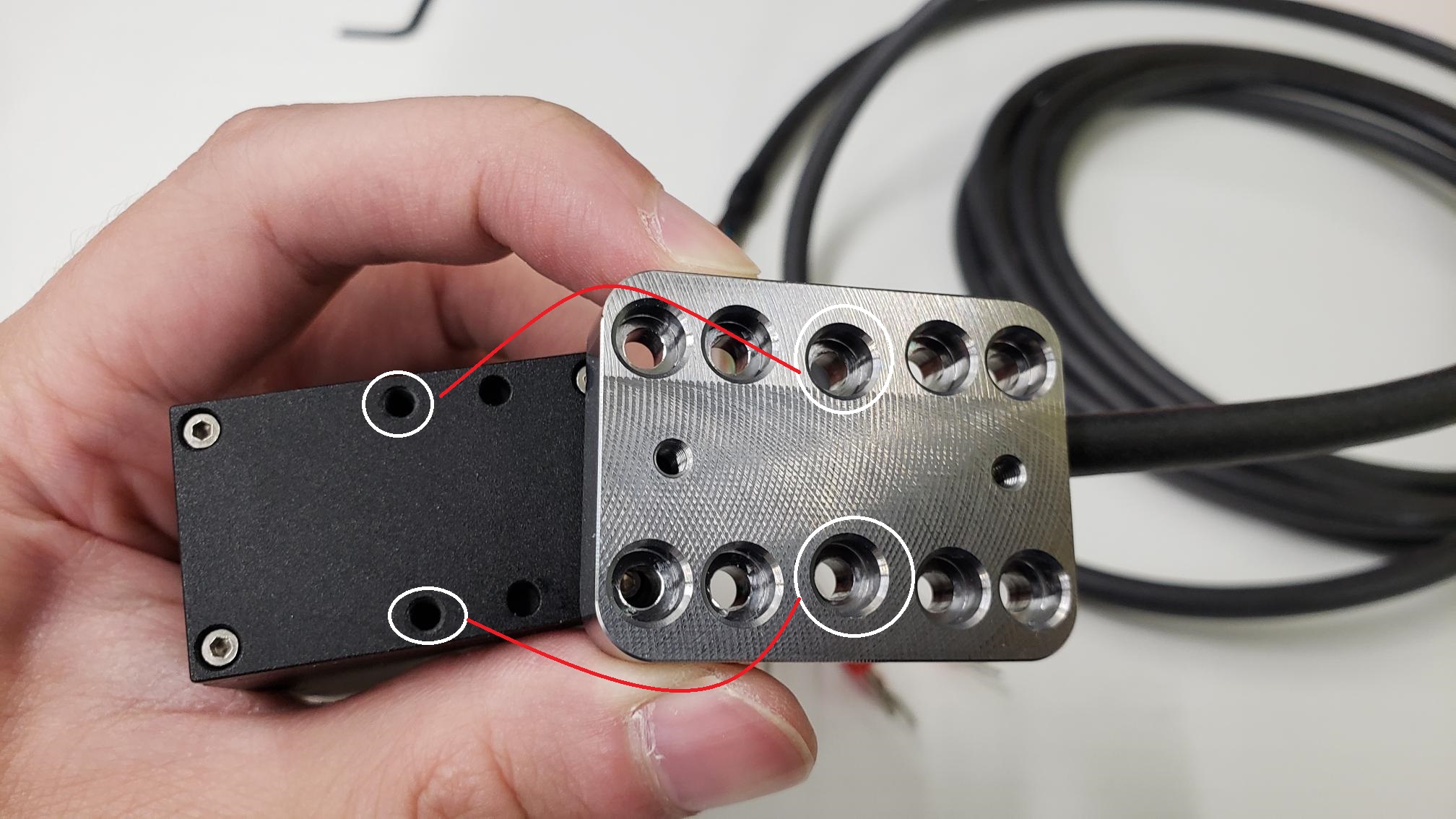
本体に同梱されているM3ネジ×2本を用いてグリッパーに変換プレートを取り付けます。

step2
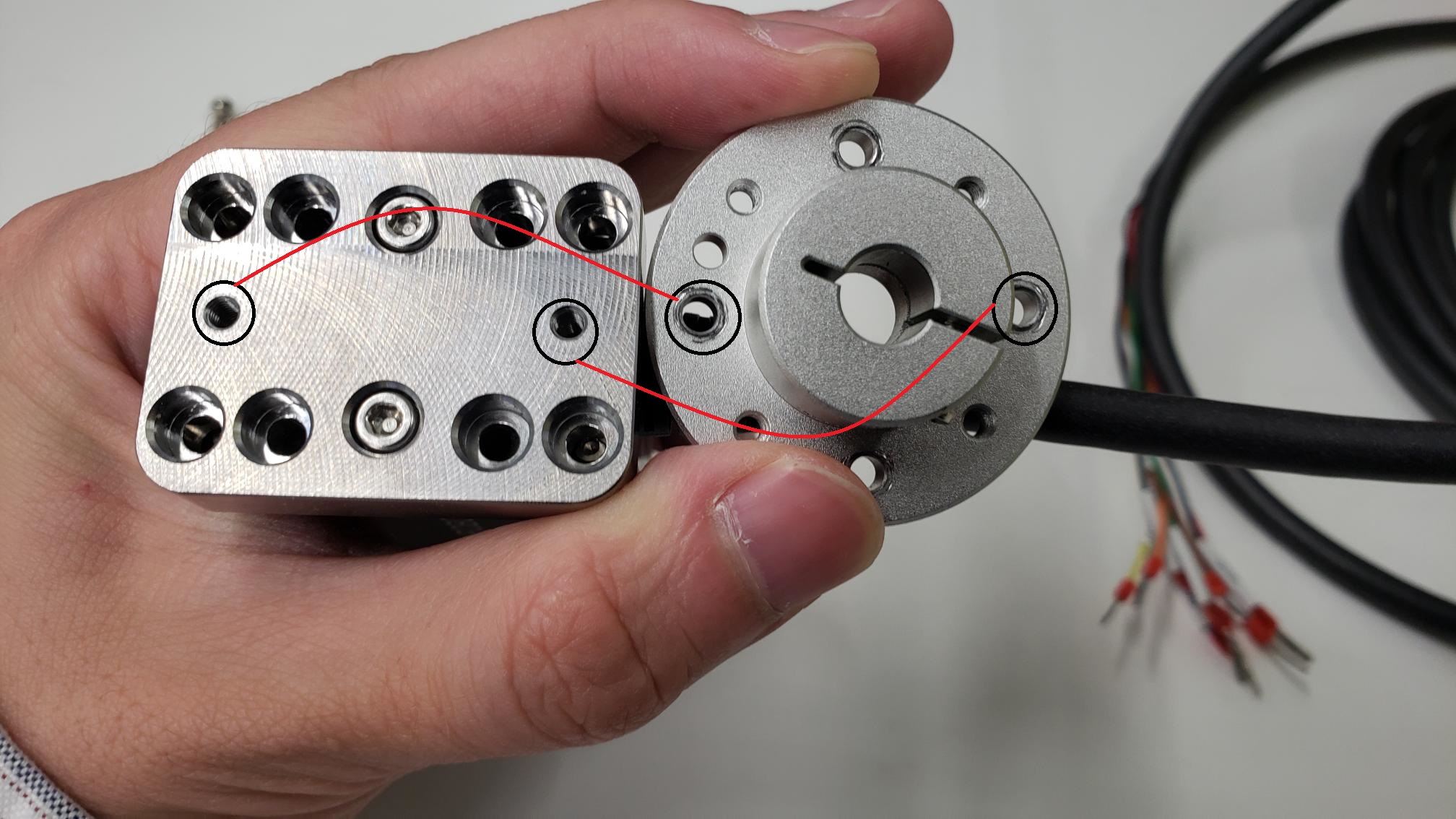
変換プレートの上にMG400のフランジ(MG400付属品)を、MG400付属品のM3ネジ×2を用いて取り付けます。
step3(オプション)
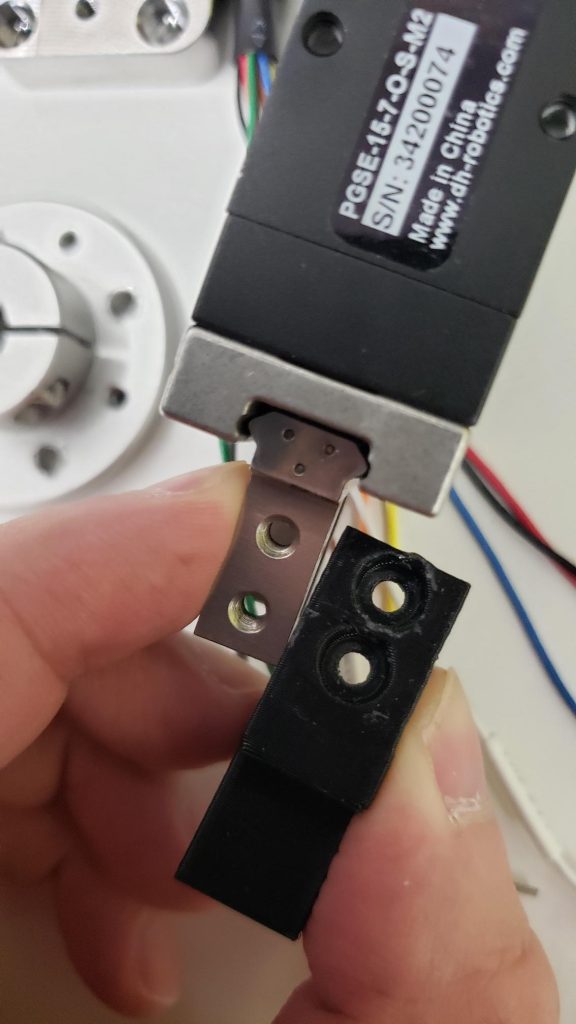
ワークの形状に合わせて自作した爪先を取り付けることも可能です。
グリッパ―本体の先にあるネジ穴にM3ネジを用いて取り付けます。
3-2. MG400との接続
step1
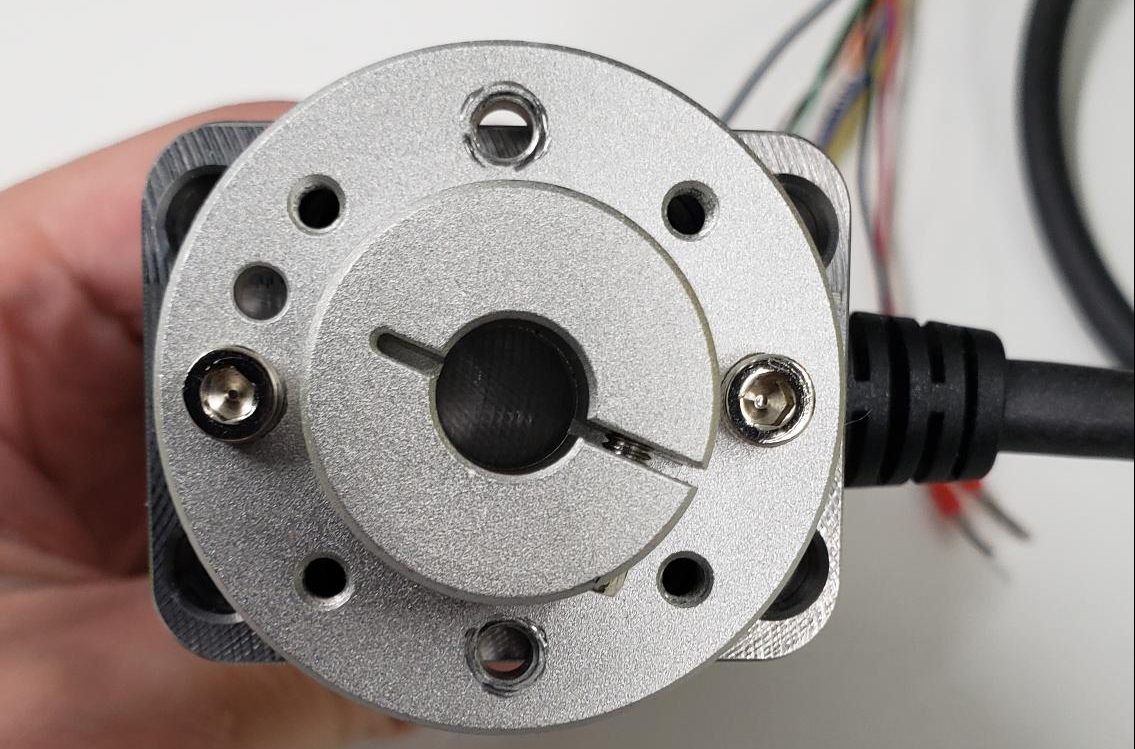
グリッパ―を、MG400のフランジを介してMG400に取り付けます。その後、MG400のフランジ側面のボルトを締めます。
[注意]モーターに負荷がかかるのを防ぐため、この操作はアームの給電を切った状態で行ってください。

step2
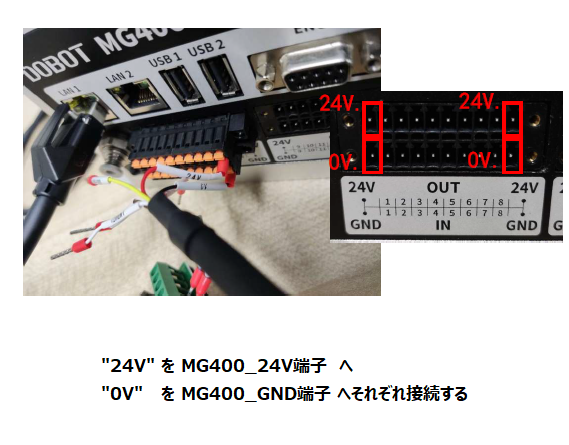
グリッパーケーブルを、以下画像のように、MG400背面のI/Oに接続してください。
使用しない配線(PE, 485A, 485B)の3本については適宜絶縁処理を施す等、通電しないような対策を行ってください。

step3
DobotStudio Proにて、小型電動グリッパーが制御できるか確認してみましょう。
正しく接続できた場合、I/OページのDO_01, DO_2の出力のさせ方に応じて下記のような動作を行うことができます。

DO_01(INPUT1と接続) – グリッパーの開閉を制御します。
(ON→)OFF : 開状態
(OFF→)ON:閉状態
と制御できます。
DO_02(INPUT2と接続) – グリッパーの初期化動作を行います。
このポートの(OFF→)ON→OFFの切り替えを検知して初期化動作を行います。
初期化動作時以外は基本OFFにしてください。

step4
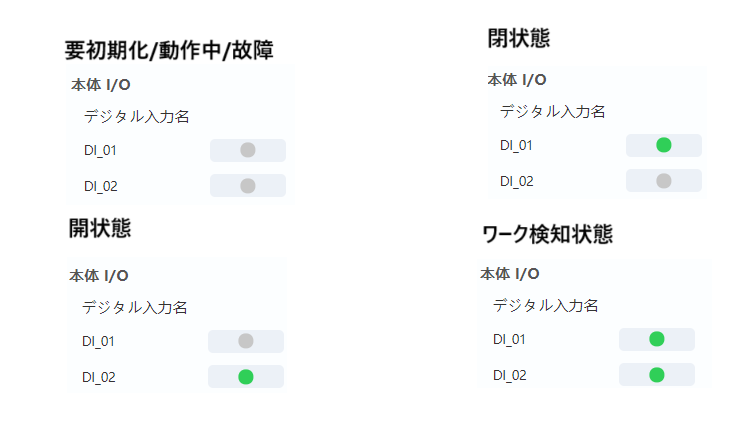
また、グリッパーからのI/Oのフィードバックにより、グリッパー本体の状態を確認することができます。
I/OページのDI_01, DI_02の4通りの入力[(0,0), (1,0), (0,1), (1,1)] において、確認することができます。

DobotStudioProから確認した場合は下記の画像のようになります。
3-3.コントロールボックスのLEDインジゲーター
グリッパー本体の状態に応じて本体横のLEDインジケーターが変化します。
| 赤点滅 | 初期化前状態(動作不可) |
|---|---|
| 青点灯 | 待機状態(動作可能) |
| 緑点灯 | ワーク検出 |
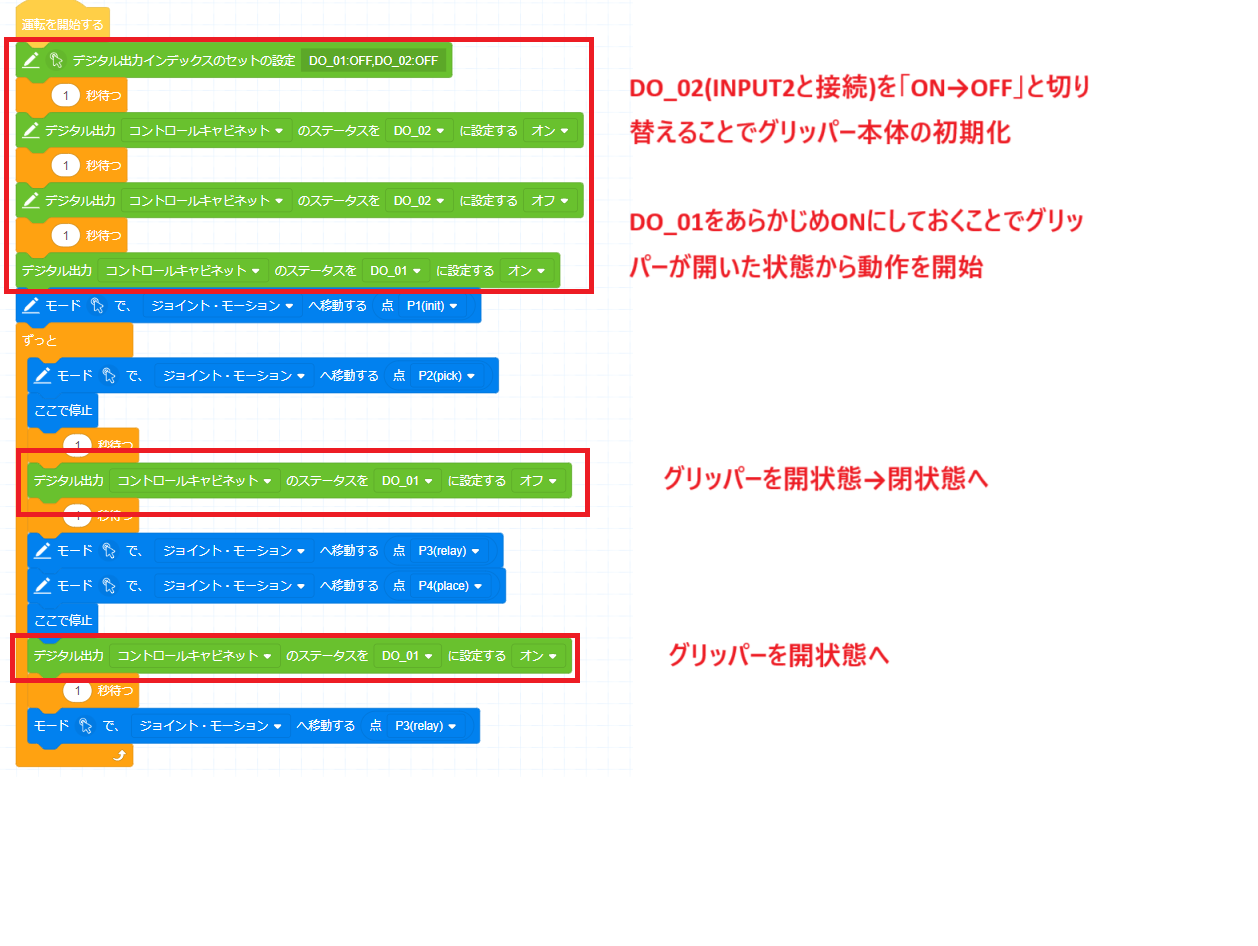
4. プログラムからの制御例(Blockly)
Blocklyを用いての動作プログラム例は下記のようになっております。
ご不明点等ございましたら、お気軽にdobot@techshare.co.jpまでお問い合わせください。