AgileX Robotics BUNKER ー クローラー型 UGV (無人走行ロボット)

※本製品は現在取り扱いを終了しております。
クローラ―型 UGV(無人走行ロボット)の開発プラットフォーム
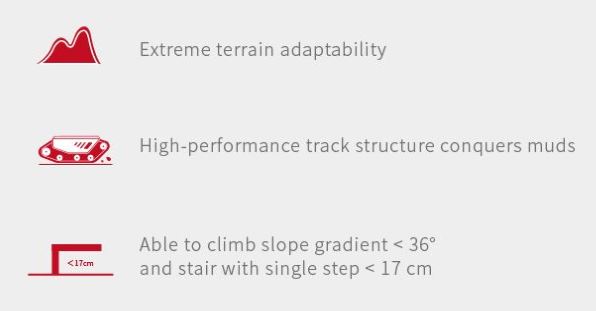
BUNKERはクローラ式の差動メカニズムを使用しており、様々な地形に対して高い適応能力を備えています。また、多様な作業環境に向けて特別に設計されています。差動回転、強力な耐荷重、強力な電力という特徴があり、屋外の複雑な作業シーンに適しています。

頑丈な工程設計
多数のサーボモーターにより、強力な電力システムと差動回転能力が備わっています。
クリスティー式サスペンションが搭載されているので、山道にも対応し、複雑な地形の坂を登ることも可能です。
クリスティー式サスペンションが搭載されているので、山道にも対応し、複雑な地形の坂を登ることも可能です。
二次開発
任意のモジュールとナビゲーションシステムを追加することで、検査・検出・輸送・農業などの多様なシナリオに使用できます。
BUNKERに様々なモジュールを組み合わせることで、屋外運用シナリオ向けの優れたパフォーマンスを提供します。
スペックの詳細
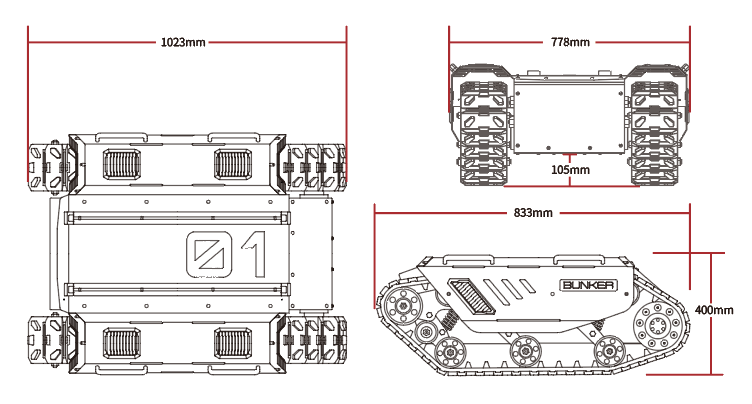
| サイズ(L×W×H) | 1023mm×778mm×400mm | 最高速度 | 6km/h |
| ホイルベース | 360mm | バッテリ稼働時間 | 4h |
| 車体重量 | 145~150kg | 充電時間 | 2.5~3h |
| 最低地上高 | 90mm | 稼働温度範囲 | 10℃~45℃ |
| 可搬重量 | 70kg | 駆動方式 | 左右独立駆動クローラー型 |
| 最小回転半径 | 0m | サスペンション機構 | クリスティー式サスペンション |
| 登坂角度 | <30° | 通信インターフェース | Standard CAN 232 Serial Port |
| 障害物乗越え能力 | 17cm |
AgileX 特別体験セミナー
本セミナーではAgileX製品の特徴のほか、ROSやROS2を用いた2次開発の基礎を学ぶことが出来ます。
3種類に拡張されたLIMO Seriesや、AgileX移動プラットフォーム製品のアプリケーションについて、実機デモを交えながらご紹介します。
会場では数多くのAgileX製品をご覧いただけますので、是非ご参加ください。


















AgileX ソリューション製品




関連情報
- AMR/UGV Developer Conference
- 2023年7月に名古屋国際会議場にて開催されました、AMR/UGV Developer Conference 2023につきまして報告ページを公開しております。 一部のユーザ講演につきまして、動画をYouTubeにて公開しておりますので、AgileX製品ご活用の参考になれば幸いです。
通販サイト

お問合せ先
TechShare株式会社 営業部 AgileX UGV/AGVチーム
〒135-0016 東京都江東区東陽5-28-6 TSビル
TEL 03-5683-7293 Email:agilex@techshare.co.jp
会社情報